

Context-based flight mode selection
A flight mode and unmanned aerial vehicle technology, applied in the direction of unmanned aerial vehicles, aircraft, aircraft control, etc., can solve difficulties, unmanned aerial vehicle control schemes are not optimal, and do not provide other problems, so as to improve adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
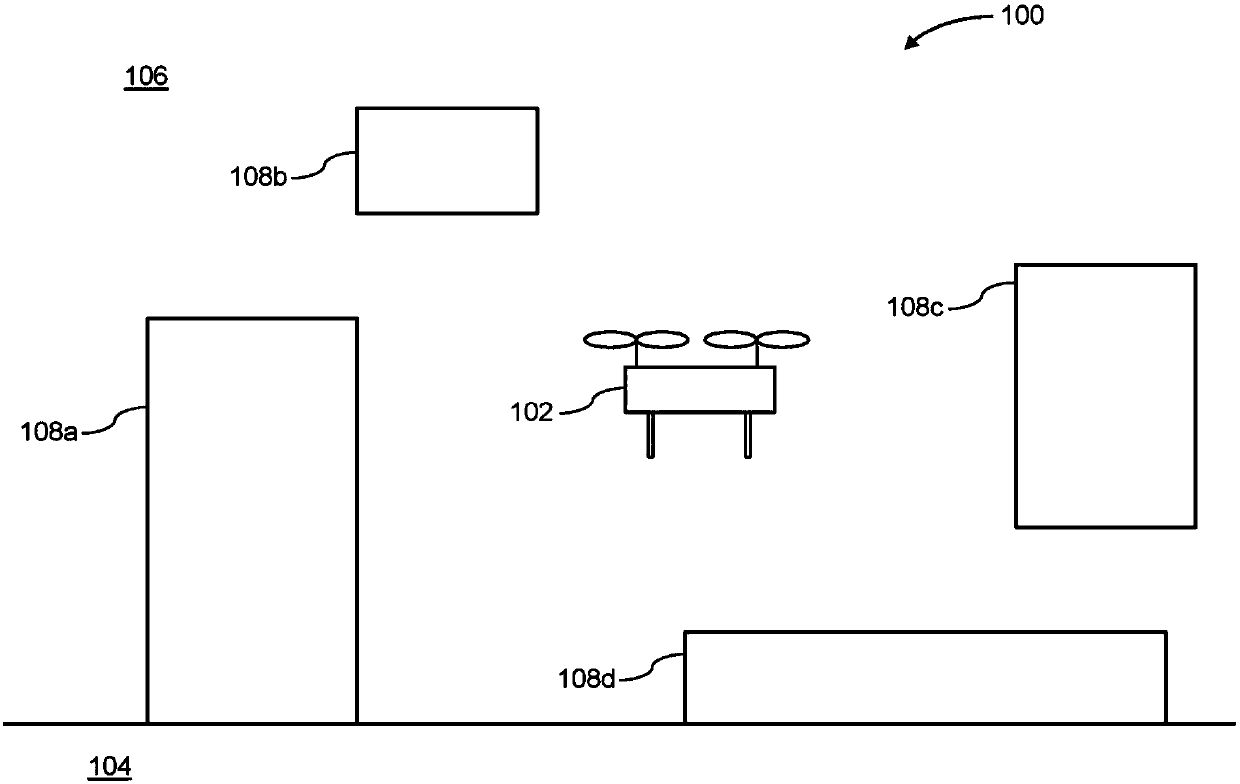
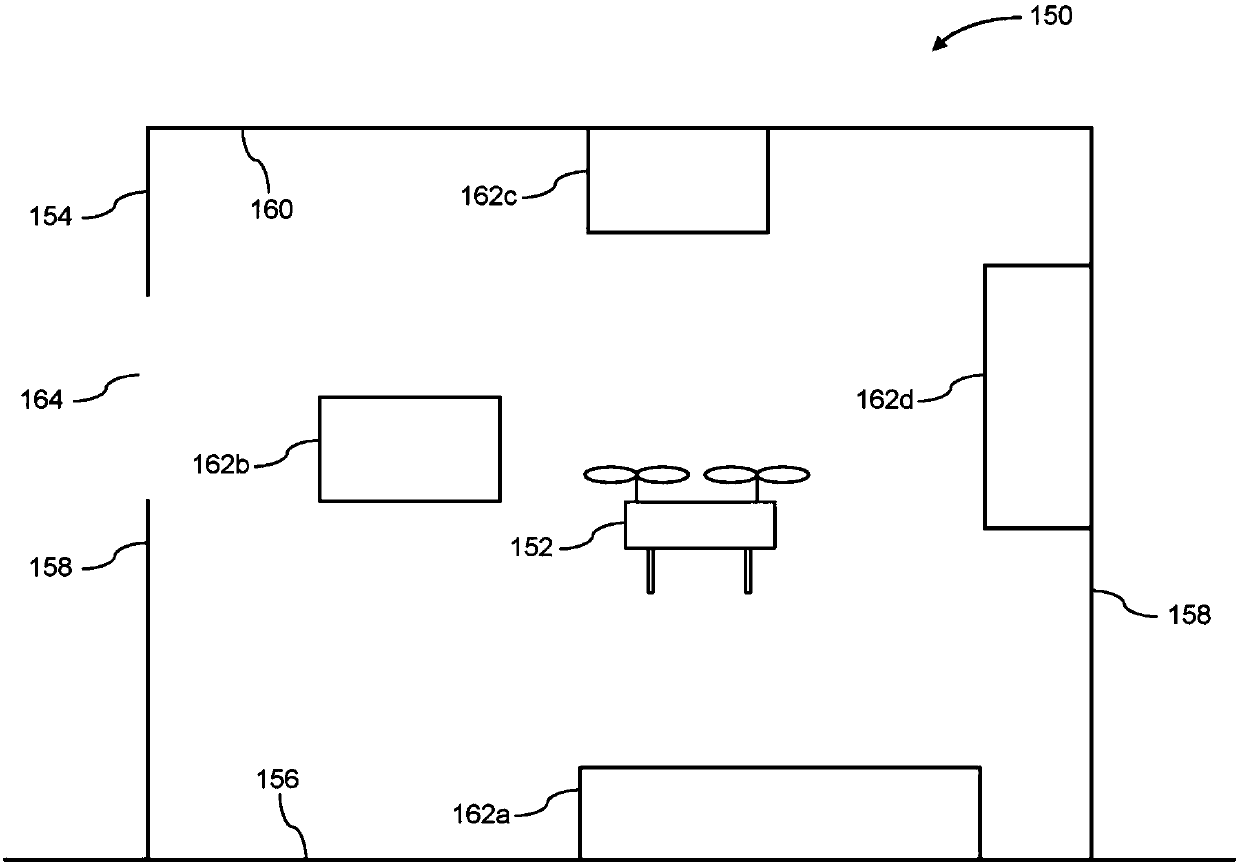
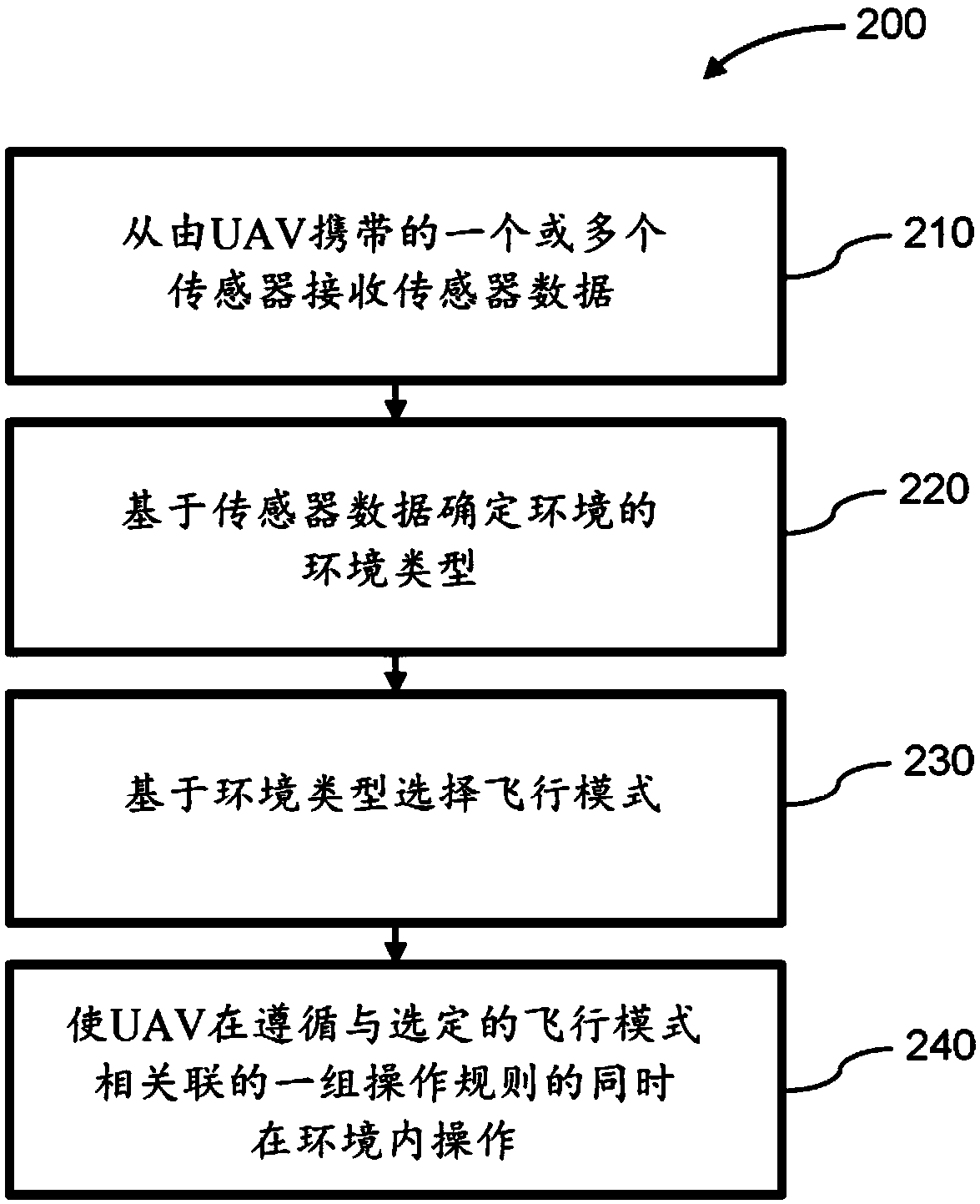
[0040] The present disclosure provides improved systems and methods for controlling the operation of unmanned aerial vehicles (UAVs). In some implementations, the UAV may be controlled (eg, manually, semi-autonomously, or fully autonomously) according to a selected flight mode. The term "flight mode" may be used herein to refer to the control scheme used to operate the UAV. Flight modes may include a set of operating rules for UAV state (eg, position, orientation, velocity, acceleration), function (eg, collision avoidance, fault detection), and / or behavior (eg, response to user commands, degree of autonomy). The flight mode may be determined automatically, for example, based on environmental data collected by one or more sensors carried by the UAV. Advantageously, the embodiments described herein can be used to automatically and dynamically optimize the operating rules of the UAV by selecting the appropriate flight mode based on the current environmental situation, thereby im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More