

Single-degree-of-freedom moving multi-ring symmetrical coupling mechanism
A technology of coupling mechanism and degree of freedom, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large working space, inconvenient transportation and execution, and insufficient dexterity and lightness of the serial mechanism, and achieve good application prospects and high rigidity. , the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
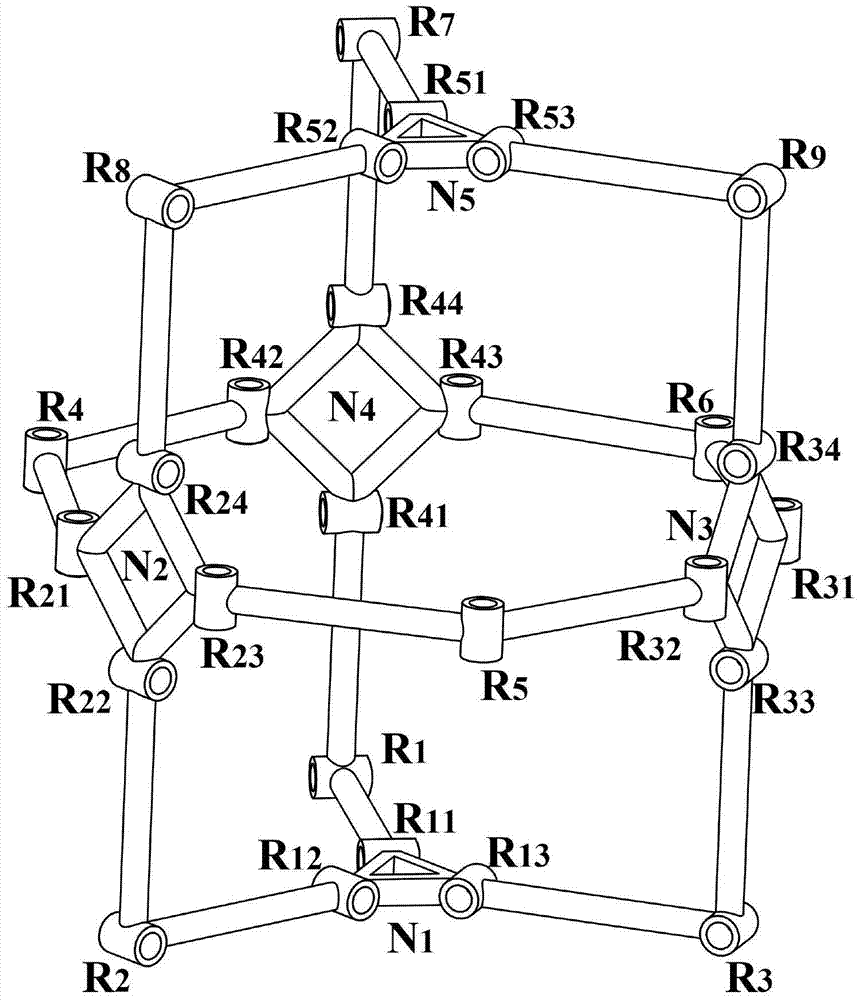
[0018] like figure 2 As shown, the first branch includes the first revolving pair (R11) of the frame, the first rod group (L1), the first revolving pair (R41) of node member one, the fourth revolving pair (R44) of node member one, The seventh rod group (L7), the first rotating pair of the moving platform (R51); the first rod group (L1) is connected to the frame (N1) through the first rotating pair (R11) of the frame, and the first rod group (L1 ) is connected with the node member one (N4) through the first revolving pair (R41) of the node member one, and the seventh bar group (L7) is connected with the node member one (N4) through the fourth revolving pair (R44) of the node member one; The composition of the first rod group (L1) is represented as a simple serial kinematic chain -R11-R1-R41-, and the composition of the seventh rod group (L7) is represented as a simple serial kinematic chain -R44-R7-R51-.
[0019] The second branch includes the second revolving pair (R12) of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More