

Gait planning method of 3D (3 dimensional) underactuated biped robot jumping motion
A biped robot and gait planning technology, applied in the field of robotics, can solve problems such as complex mechanical system design, increased difficulty in robot system implementation, and unsatisfactory performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with drawings and embodiments.
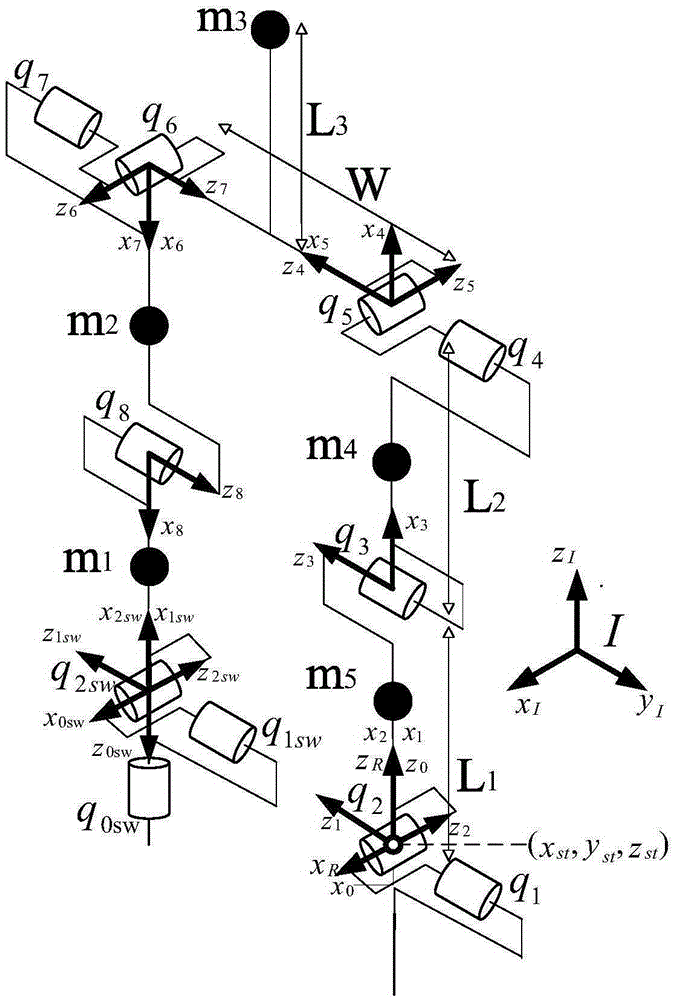
[0039] The robot involved in the embodiment of the present invention is as figure 1 As shown, it is a five-bar underactuated biped robot, and it is assumed that the mass of the bars is concentrated at the center of mass. The robot walks outwards perpendicular to the surface of the paper. The left leg of the robot is on the right side of the picture, which is also the supporting leg for jumping. The robot has 8 independent degrees of freedom, where q 0 is the yaw angle of the supporting leg of the robot, which determines the forward direction of the robot, q 1 ,q 2 is the ankle joint angle of the supporting leg of the robot, q 3 is the knee joint angle of the supporting leg of the robot, q 4 ,q 5 is the hip joint angle of the supporting leg, q 6 ,q 7 is the hip joint angle of the swing leg, q 8 Knee joint angle for the swing leg. where the degrees of freedom q ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More