

Multi-finger hooping and elastic shifting rod cluster adaptive robot hand device
A robotic hand, self-adaptive technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of high energy consumption, complex structure, poor clamping effect, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
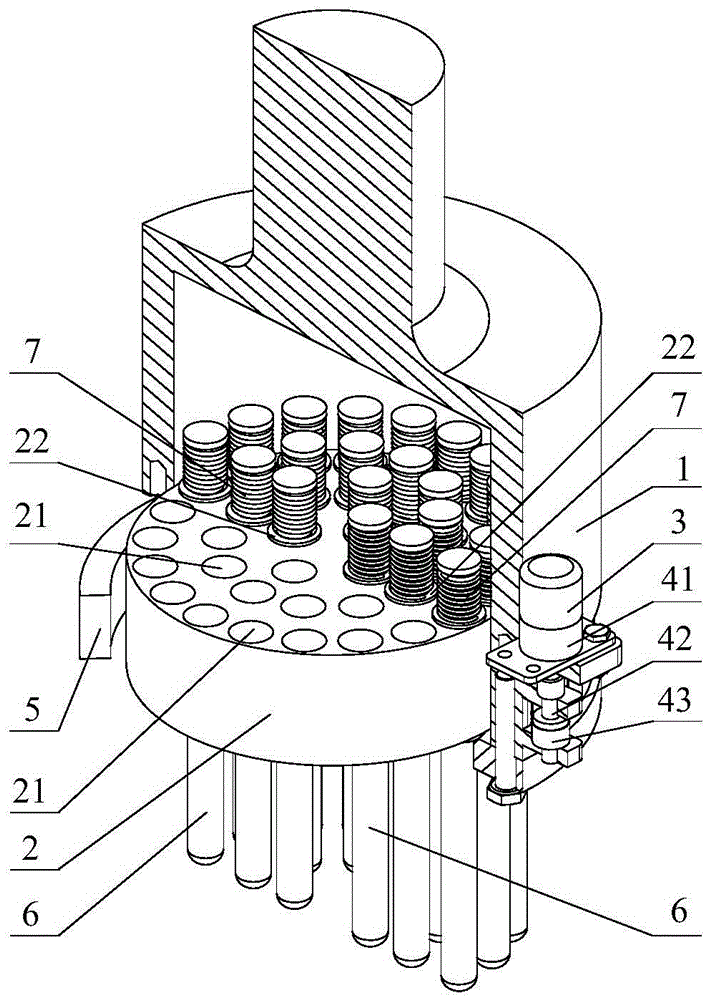
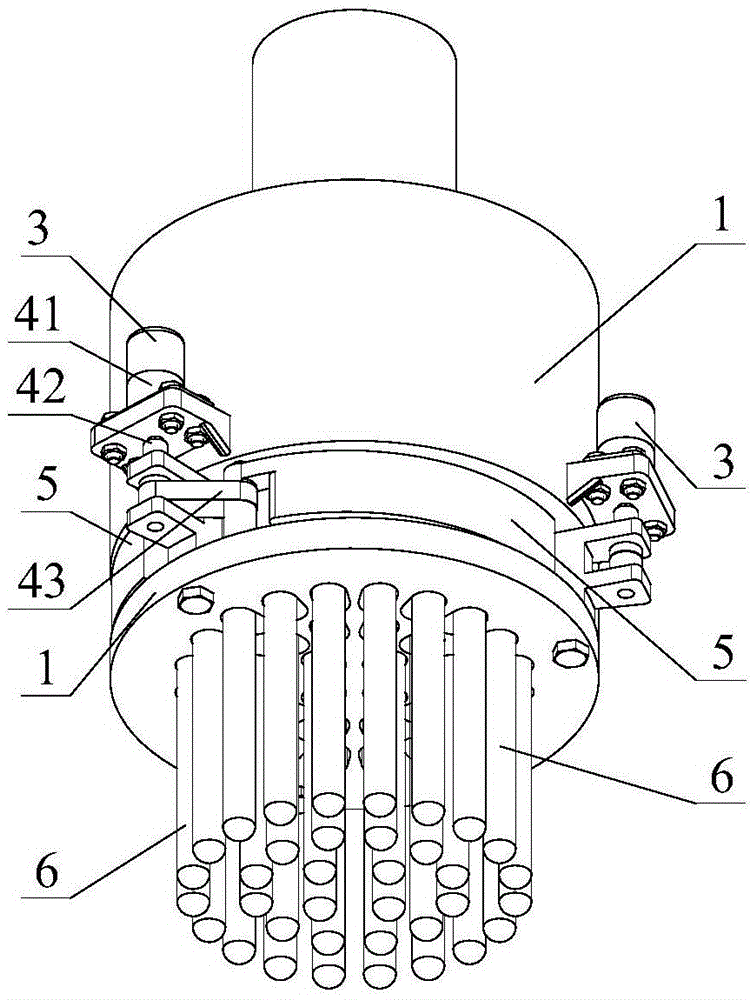
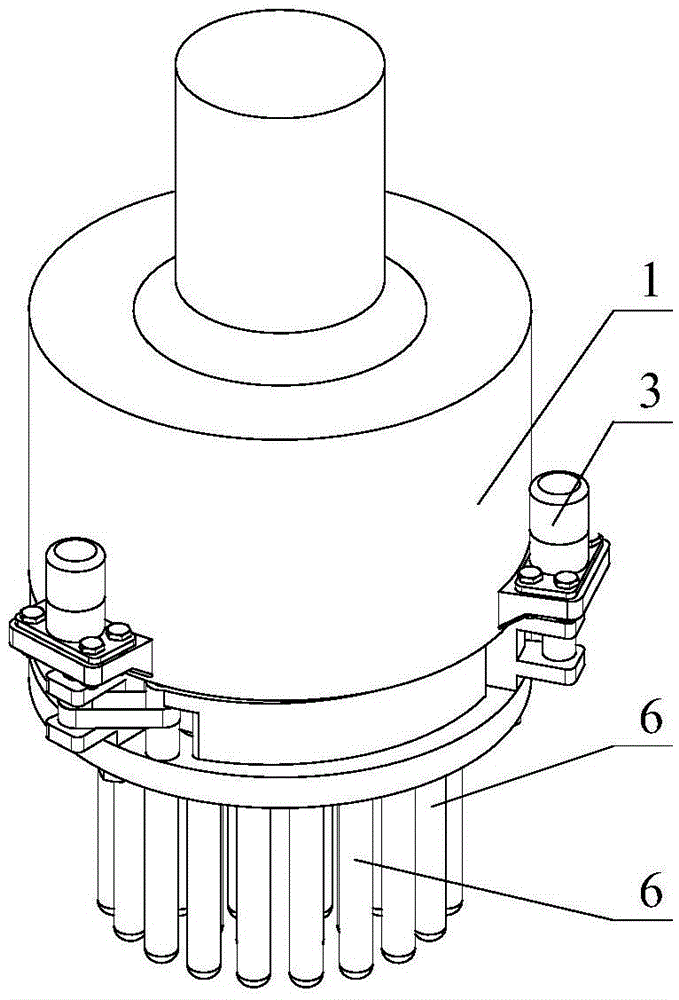
[0042] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0043]A multi-finger hoop elastic displacement rod cluster adaptive robot hand device according to the present invention is characterized in that it includes a base, a porous elastic block, a driver, a transmission mechanism, at least one finger, K sliding push rods and K a spring; the porous elastic block is installed in the base, the porous elastic block is elastic, there are K through holes on the porous elastic block, and the angle between the centerlines of any two through holes is less than 15 degrees; The output shaft of the driver is connected to the input end of the transmission mechanism, and the output end of the transmission mechanism is connected to the finger; the i-th sliding push rod is slidably embedded in the i-th through hole, and the i-th sliding push rod The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More