Unlock instant, AI-driven research and patent intelligence for your innovation.
Modeling method of complex dynamic network and design method of model controller
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A technology of complex dynamic network and modeling method, which is applied in the design field of random pinning controller, and can solve the problem that the design of random pinning controller is not very good.
Inactive Publication Date: 2018-07-17
LIAONING UNIVERSITY OF PETROLEUM AND CHEMICAL TECHNOLOGY
View PDF5 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
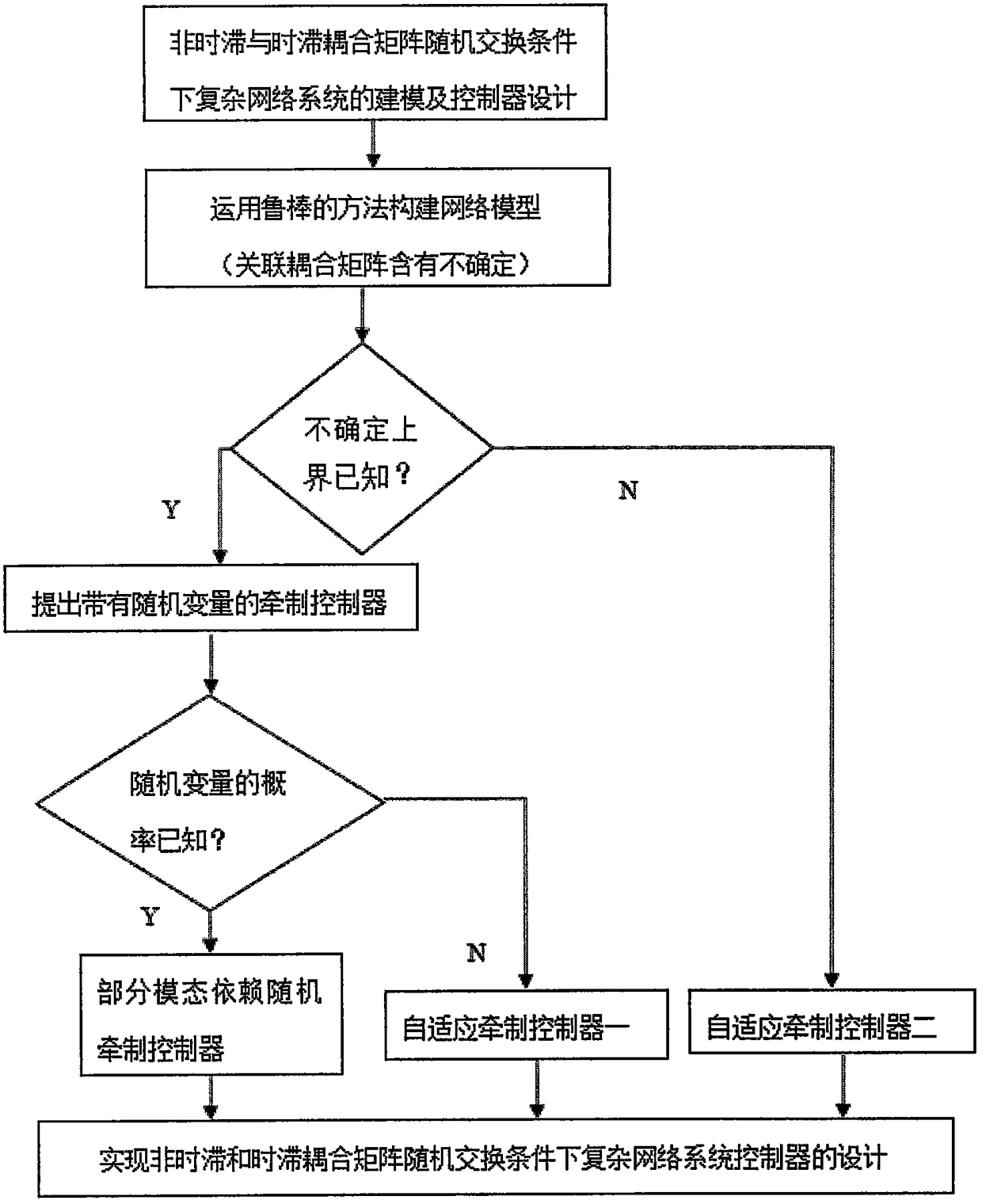
[0004] At present, there is no good method for the establishment of complex dynamic network models of non-time-delay and time-delay coupled random exchange and the design of stochastic pinning controllers for this model. All these facts will promote and promote the completion of the patent of this invention
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0047] S1. Consider a complex dynamic network with non-time-delay and time-delay coupling. It is composed of N nodes, and each node is an n-dimensional dynamic system. The specific description is:
[0048]
[0049]
[0050] S2, take A=(a ij )∈R N×N And B=(b ij )∈R N×N Respectively represent the non-delay and time-delay coupling matrices of the complex dynamic network; matrices A and B are symmetric and satisfy
[0051]
[0052] Among them, i≠j, if there is non-delay and time-delay coupling between nodes i and j, then a ij >0 and b ij >0; otherwise, a ij = 0 and b ij =0;
[0053] Consider the random exchange of related coupling matrices, that is, matrices A and B can be interchanged, and the following complex dynamic network is obtained:
[0054]
[0055] Among them, the switching between systems (1) and (2) is independent and random;
[0060] Design a partial delay-dependent stochastic containment controller for the above system model,
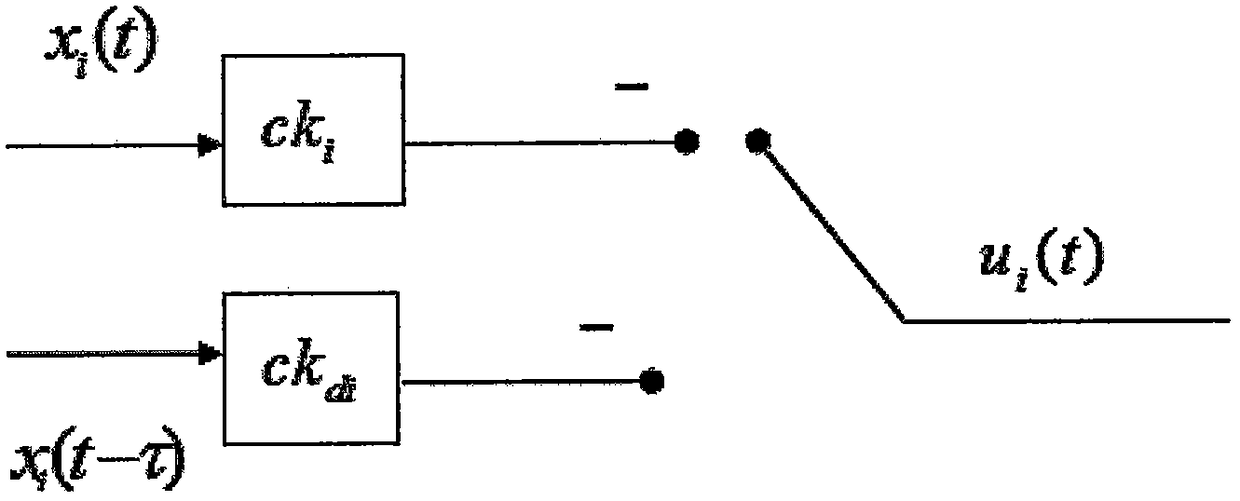
[0061] Select the first l nodes to join the partial delay-dependent stochastic pin controller u i (t), the specific description is as follows:
[0062]
[0063] Here k i And k di Respectively represent the non-time delay and time delay state feedback controlgain. α(t) is a Bernoulli random variable and is described as follows:
[0064]
[0065] The corresponding probability is expressed as:
[0066] Pr{α(t)=1}=ε{α(t)}=α * , Pr{α(t)=0}=1-α *
[0067] Here α * ∈[0,1] and ε{α(t)-α * } = 0; the first form of the controller is suitable for α * There are two cases of precise known and uncertain. Its characteristic is that during the establishment process, the controller includes two parts, non-time-delay and time-delay, and these two parts appear based on certain probability conditions. The controller can stabilize the complex network system by solving the appropriate control gain....
Embodiment 3
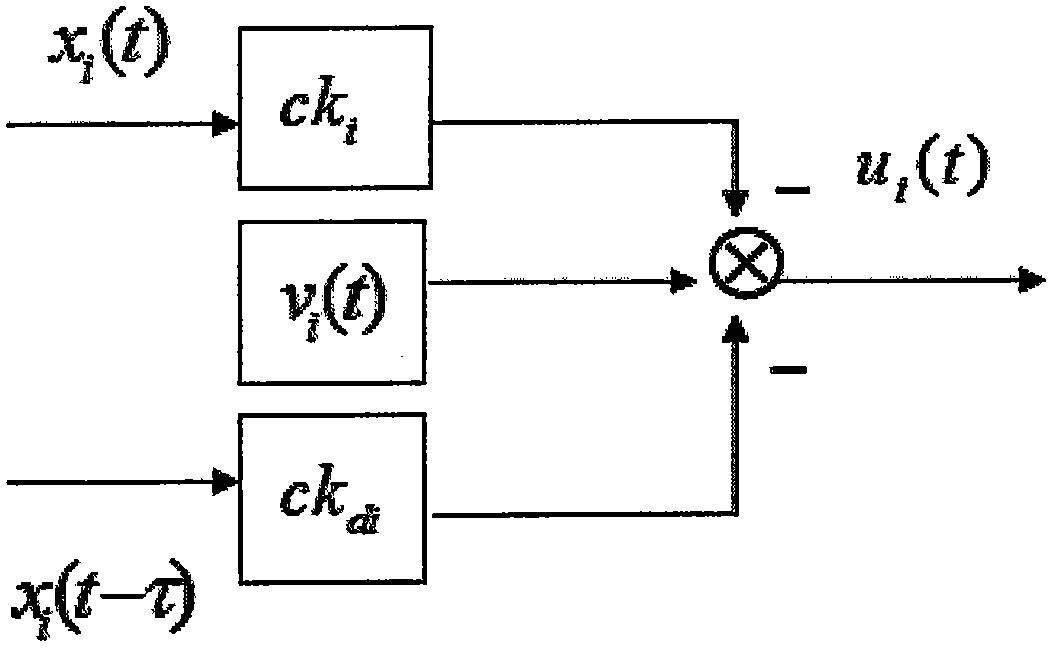
[0069] Construct an adaptive stochastic containment controller, suitable for the following two situations
[0070] α * Unknown, δ * Known and α * Known, δ * unknown;
[0071] For the former, it has the following forms during the establishment process:
[0072]
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a complex dynamic network modeling method and a model controller design method. Modeling of a complex dynamic network is performed under the condition of random exchange of non-time-delay and time-delaycoupling matrixes by applying the idea of robustness firstly, a novel partially time-delay dependent random spinning controller is designed and the problem of stabilization of the complex networksystem under the condition of random exchange of the coupling matrixes related to network topology is solved. The designed spinning controller is different from conventional controllers, the non-time-delay and time-delay state feedbacks of the spinning controller asynchronously occur at a certain probability. Corresponding sufficient conditions enabling the system to be stabilized are given and prevented in linear matrix inequalities under the effect of the designed controller based on the constructed complex network model. When the probability of random variables is unavailable, a self-adaptive partially time-delay dependent controller is provided for processing the situation.
Description
Technical field [0001] The invention relates to a model establishment of a complex dynamic network under the condition of a non-time-delay and time-delay coupling matrix random exchange and a design of a stochastic containment controller aiming at this model to stabilize the system, belonging to the technical field of automatic control. Background technique [0002] With the rapid development of science and technology, mankind has entered the Internet age, and complex networks have become a hot topic. Complex networks are an important means to describe and study complex systems. All complex systems can be abstracted as interacting individuals from different perspectives of actual backgrounds, such as ecological networks, food chains, gene regulation networks, social networks, and distributed sensor networks. The research of complex networks has become a frontier subject, with many subjects intersecting and facing more and more challenges. The popularization of complex networks h...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.
Login to View More
Patent Type & Authority Patents(China)
IPC IPC(8): G05B13/04
CPCG05B13/04
Inventor 王国良柳强李博宇闫婷婷
Owner LIAONING UNIVERSITY OF PETROLEUM AND CHEMICAL TECHNOLOGY

 Login to View More
Login to View More  Login to View More
Login to View More