

Amphibious multi-legged robot with metamorphic mechanical legs
A multi-legged robot and mechanical leg technology, applied in the field of robotics, can solve the problems of the robot's ability to overcome obstacles on land, complex switching methods, and lack of underwater driving mechanisms, so as to improve the ability to overcome obstacles on land, avoid manual intervention, and improve The effect of structural strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
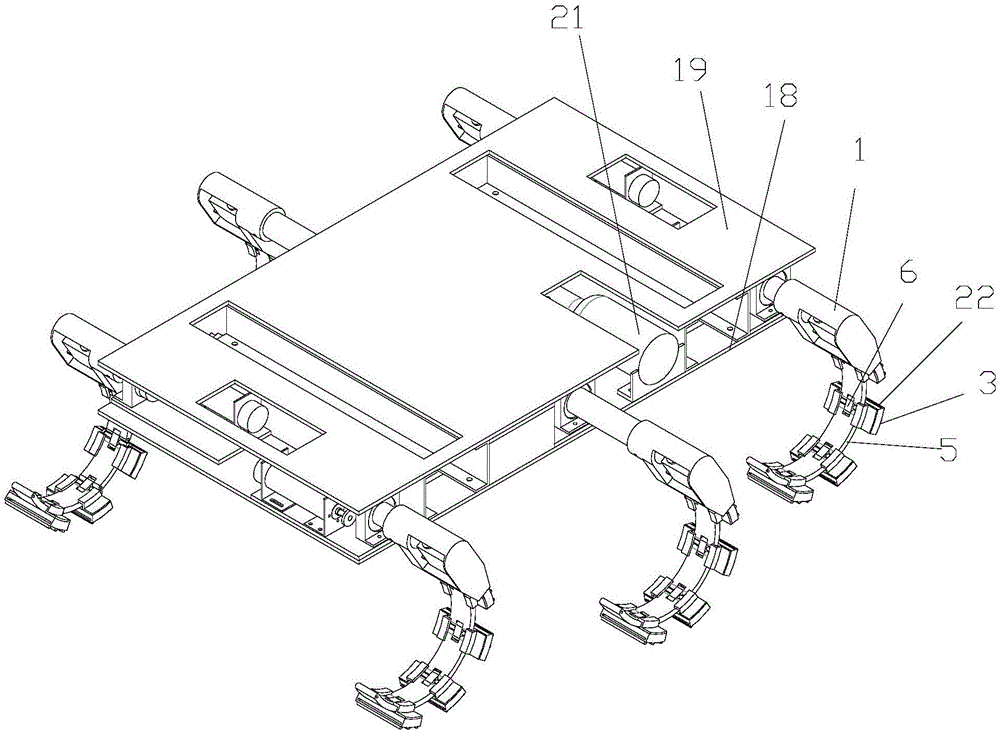
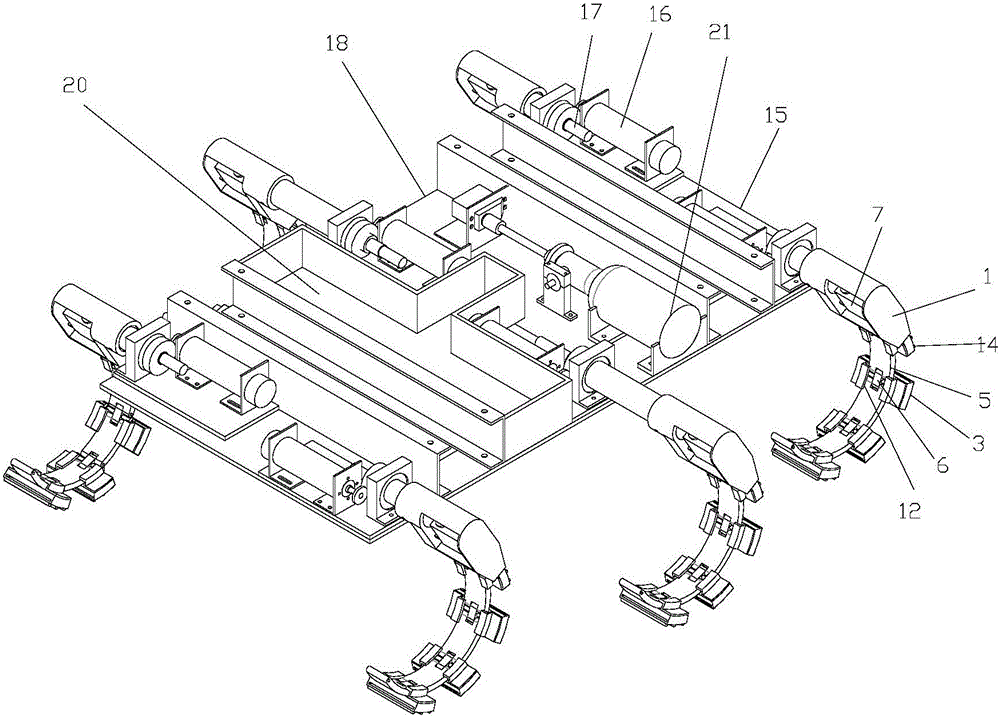
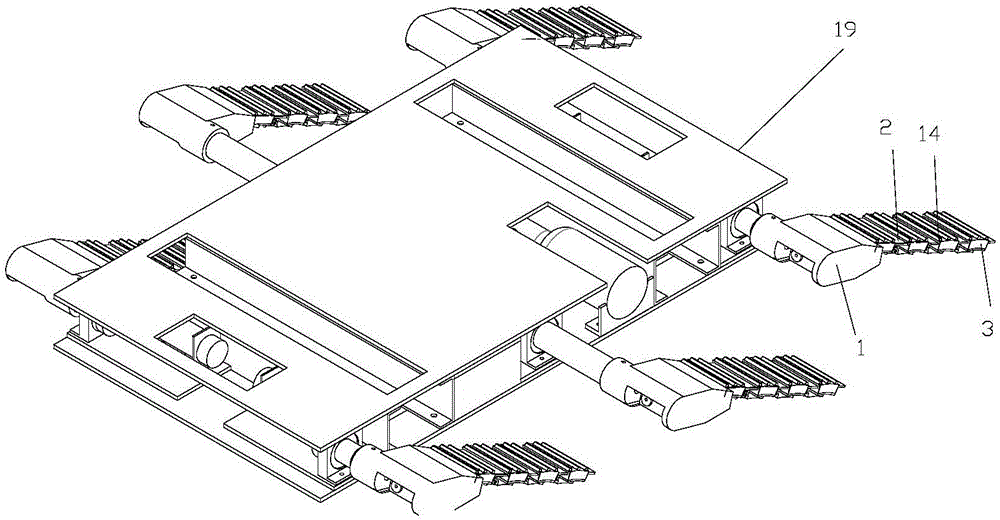
[0023] figure 1 It is a structural schematic diagram when the elastic leg body of the present invention is in an arc shape, figure 2 It is a schematic diagram of the structure without a cover plate when the elastic leg body of the robot of the present invention is in an arc shape, image 3 It is a structural schematic diagram when the elastic leg body of the present invention is a straight form, Figure 4 It is a structural schematic diagram when the elastic leg body of the robot of the present invention is in an arc shape, Figure 5 It is a schematic diagram of the structure when the elastic leg body of the robot of the present invention is in a straight shape, as shown in the figure: the amphibious multi-legged robot with metamorphic mechanical legs in this embodiment includes a body 15 and two sides arranged side by side on the body 15. At least two metamorphic mechanical legs, which also include power components arranged on the body and used to drive the movement of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More