

Energy efficiency hierarchical coordination optimization control method for four-wheel drive extended-range electric vehicle
A technology of electric vehicles and four-wheel drive, which is applied in electric vehicles, engine-driven traction, battery/fuel cell control devices, etc., and can solve problems such as not having optimal drive efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
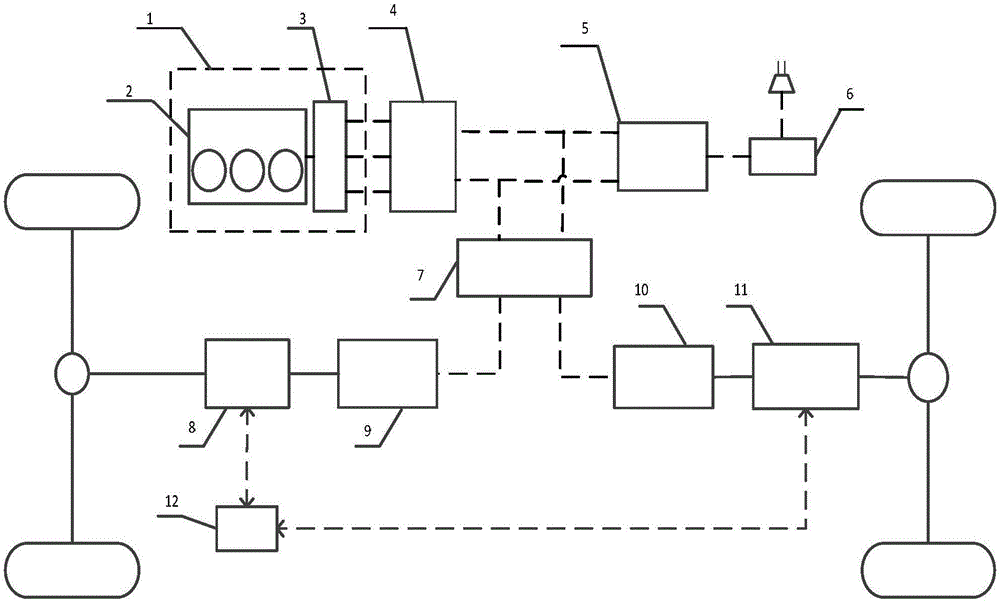
[0059] Specific implementation mode one: combine figure 1 with figure 2 To describe this embodiment,
[0060] A four-wheel-drive extended-range electric vehicle power system, including a range extender 1, a rectifier 4, a power battery 5, a charger 6, an inverter system 7, a first transmission 8, a first drive motor 9, and a second drive Motor 10, second transmission 11 and TCU12;
[0061] The range extender 1 includes an engine 2 and a generator 3; the output end of the engine 2 is mechanically connected to the input end of the generator 3; the output end of the generator 3 is electrically connected to the input end of the rectifier 4; the output end of the charger 6 is connected to the power battery 5 Input terminal electrical connection;
[0062] The output end of the rectifier 4 and the output end of the power battery 5 are electrically connected to the input end of the inverter system 7,
[0063] The output terminal of the rectifier 4 and the output terminal of the p...
specific Embodiment approach 2
[0074] Specific implementation mode two: combination image 3 To describe this embodiment,
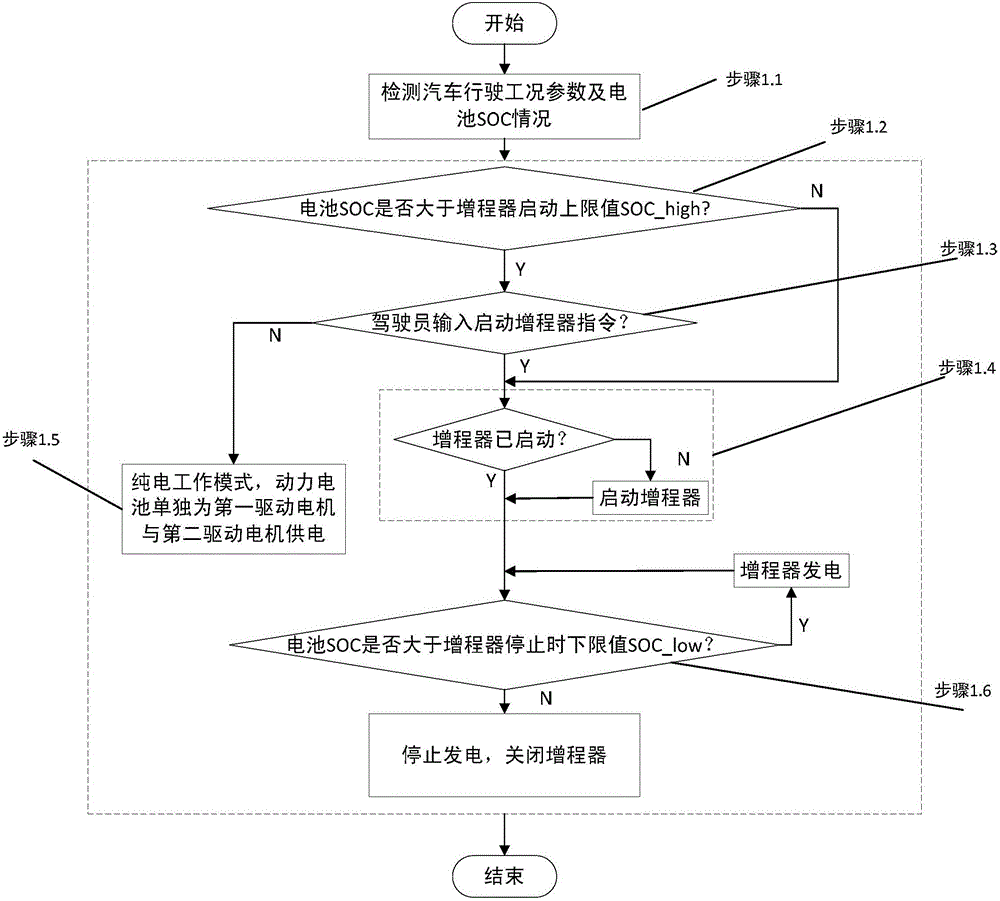
[0075] The determination of the vehicle operation mode and the working state of the range extender 1 described in step 1 of this embodiment includes the following steps:
[0076] Step 1.1: Detect the parameters of the vehicle's driving conditions and the SOC of the power battery;
[0077] Step 1.2: Determine whether the SOC of the power battery is greater than the upper limit value of the range extender SOC_high (also the lower limit value of the pure electric working mode), if so, perform step 1.3, otherwise perform step 1.4;
[0078] Step 1.3: Determine whether the driver has input the command to start the range extender, if so, execute step 1.4, otherwise execute step 1.5;
[0079] Step 1.4: Determine whether the range extender is activated, if so, perform step 1.6, otherwise continue to control the range extender to start;
[0080] Step 1.5: The car runs in pure electric working...
specific Embodiment approach 3
[0083] Specific implementation mode three: combination Figure 4 To describe this embodiment,
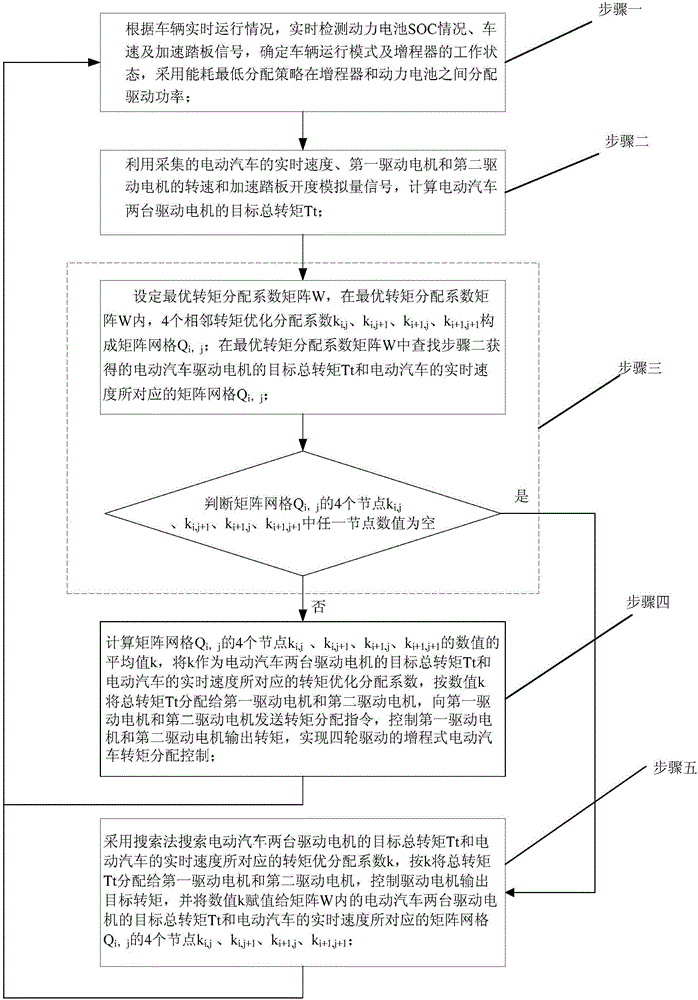
[0084] Step 5 of this embodiment uses the search method to search for the target total torque Tt of the two drive motors of the electric vehicle and the torque optimal distribution coefficient k corresponding to the real-time speed of the electric vehicle and distributes the target total torque Tt to the first The process of driving the motor and the second driving motor includes the following steps:
[0085] Step 5.1. Obtain the target total torque Tt(i′) of the two driving motors of the electric vehicle at time i′
[0086] Step 5.2, set the torque optimization distribution coefficient k, k is the ratio of the output torque of the first drive motor to the total output torque Tt(i') of the drive motor at time i', the search interval [a, b] of k, search The initial search interval of the interval [a, b] is [0, 1]; set the search ratio x, x<1; the search convergence accuracy is ε; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More