Target searching method and apparatus
A target and target object technology, applied in the field of automatic control of drones, can solve problems such as the inability to directly lock the target, the difficulty of drones, and the restriction of GPS signals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
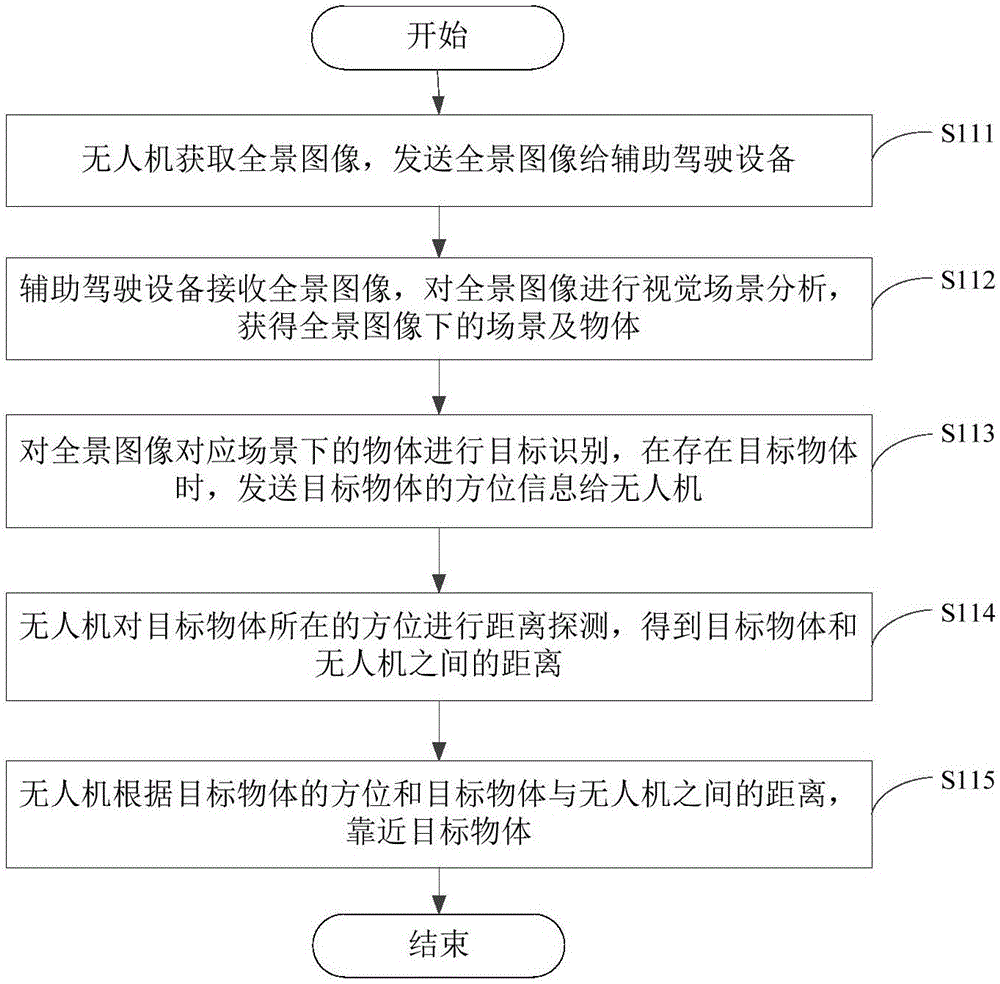
[0059] Please refer to image 3 , image 3 It is a flow chart of the method for finding a target provided by the first embodiment of the present invention, and the method is applied to the UAV 100 and the auxiliary driving device 200 connected by communication. The specific process of the method for finding the target will be described in detail below.
[0060] Step S111 , the UAV 100 acquires a panoramic image, and sends the panoramic image to the driving assistance device 200 .
[0061] In this embodiment, the UAV 100 can collect panoramic images around the UAV 100 by setting two panoramic optical cameras. Specifically, the installation positions of the two panoramic optical cameras may be opposite, so as to realize image collection without dead angles. In this embodiment, preferably, one of the panoramic optical cameras is arranged on one side of the propeller of the UAV 100 for acquiring images of the sky, and the other panoramic optical camera is arranged on the abdome...
no. 2 example
[0075] Please refer to Figure 4 , Figure 4 It is a flow chart of the method for finding a target provided by the second embodiment of the present invention, and the method is applied to the auxiliary driving device 200 connected in communication with the UAV 100 . The specific process of the method for finding the target will be described in detail below.
[0076] Step S211 , receiving the panoramic image captured by the UAV 100 .
[0077] Specifically, after the UAV 100 obtains the panoramic image through the panoramic optical camera, it transmits the data of the panoramic image to the driving assistance device 200 .
[0078] Step S212, performing visual scene analysis on the panoramic image to obtain scenes and objects under the panoramic image.
[0079] In this embodiment, the driving assistance device 200 uses a neural network algorithm of deep learning to perform visual scene analysis on the panoramic image to obtain scenes and objects under the panoramic image.
[...
no. 3 example
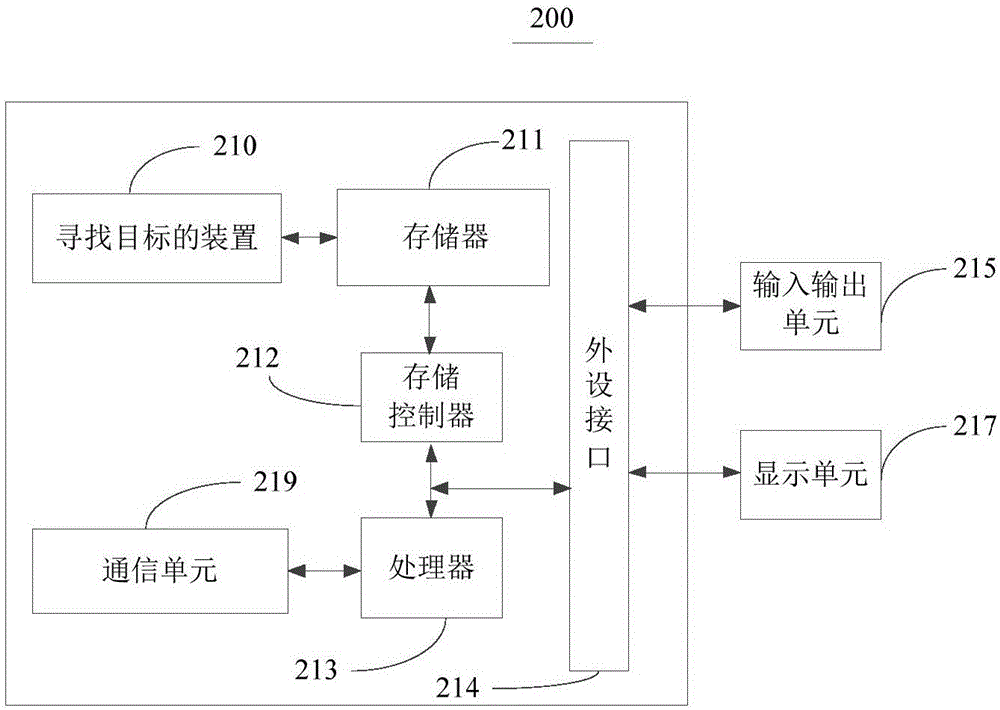
[0087] Please refer to Figure 5 , Figure 5 The third embodiment of the present invention provides a device 210 for finding a target, and the device 210 is applied to a driving assistance device 200 connected in communication with the UAV 100 . The device 210 includes: a receiving module 2101 , a visual scene analysis module 2102 , and a target recognition module 2103 .
[0088] The receiving module 2101 is configured to receive the panoramic image captured by the UAV 100 .
[0089] The receiving module 2101 is configured to execute step S2111 in the second embodiment.
[0090] The visual scene analysis module 2102 is configured to perform visual scene analysis on the panoramic image to obtain scenes and objects under the panoramic image. The visual scene analysis module 2102 uses a neural network algorithm based on deep learning to analyze the received panoramic image to obtain scenes and objects under the panoramic image.
[0091] The visual scene analysis module 2102 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More