

A flexible surgical tool system with drive input front
A surgical tool and flexible technology, which is applied in the field of flexible surgical tool systems, can solve problems such as the difficulty of miniaturizing surgical instruments and the difficulty of further improving the movement performance of instruments, and achieve the effect of ensuring practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
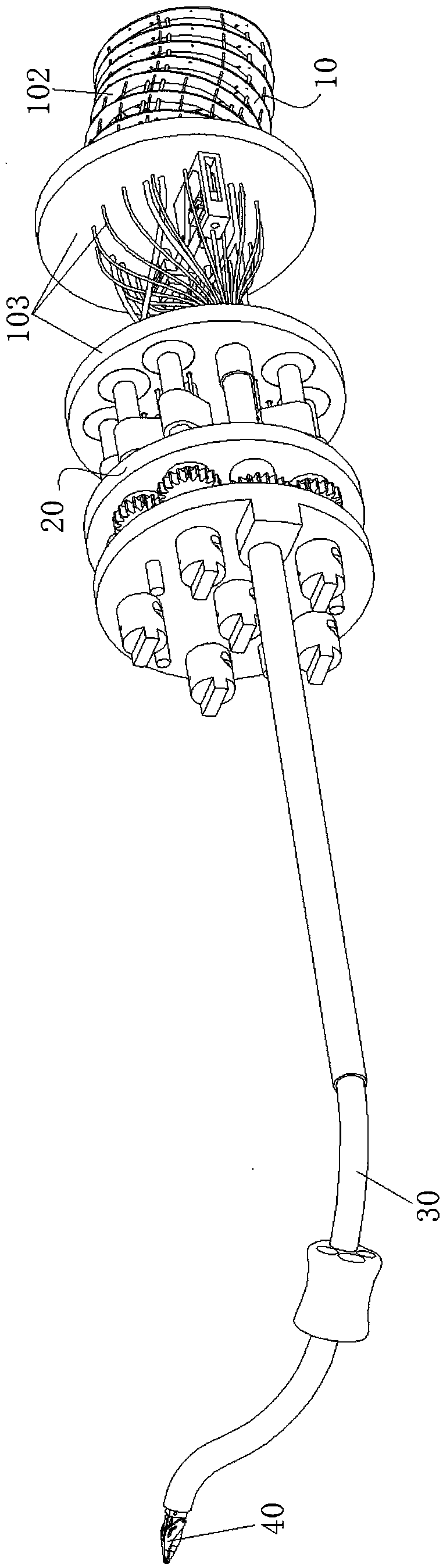
[0030] Such as figure 1 As shown, the present invention includes a flexible continuum structure 10 and a drive unit 20 .
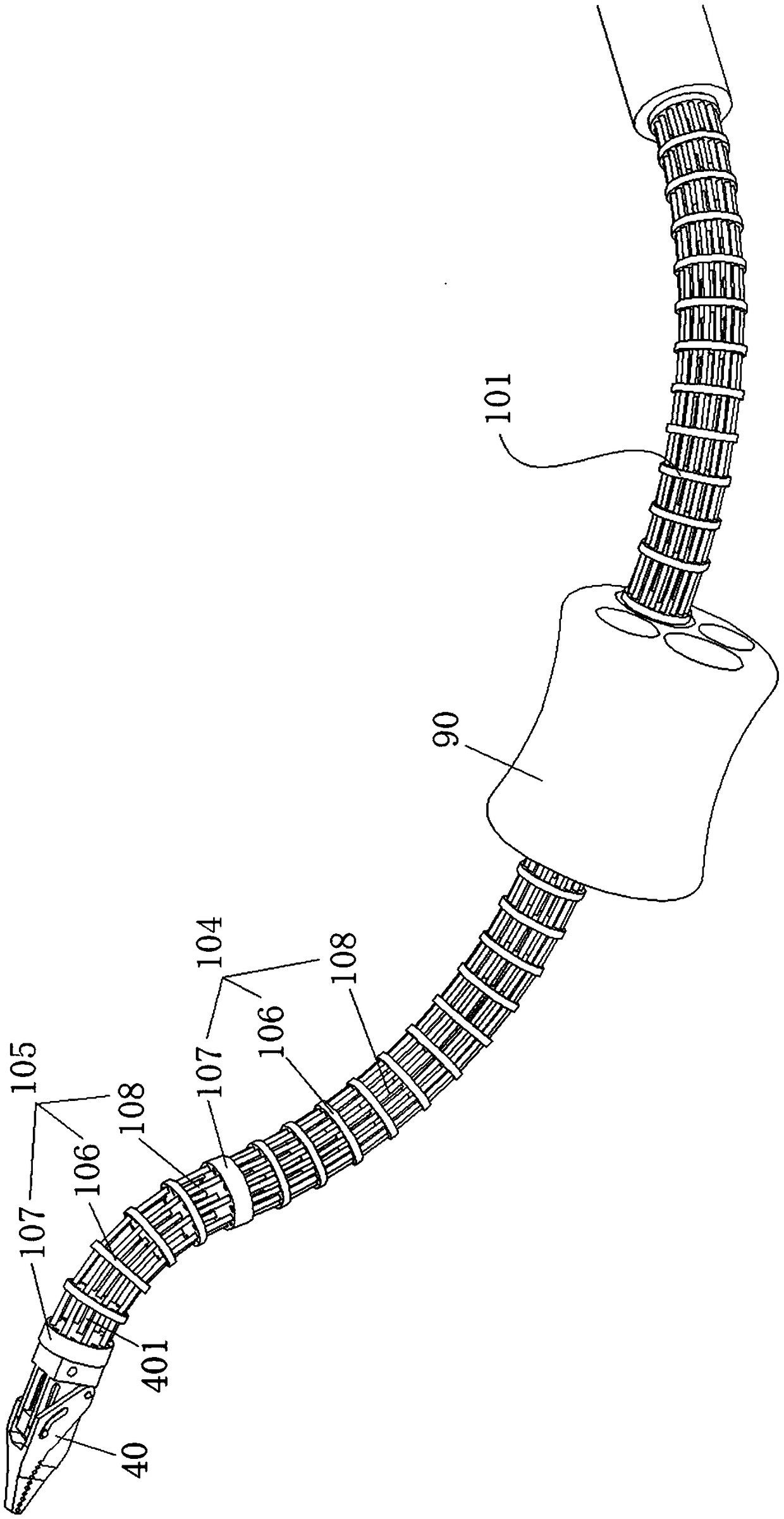
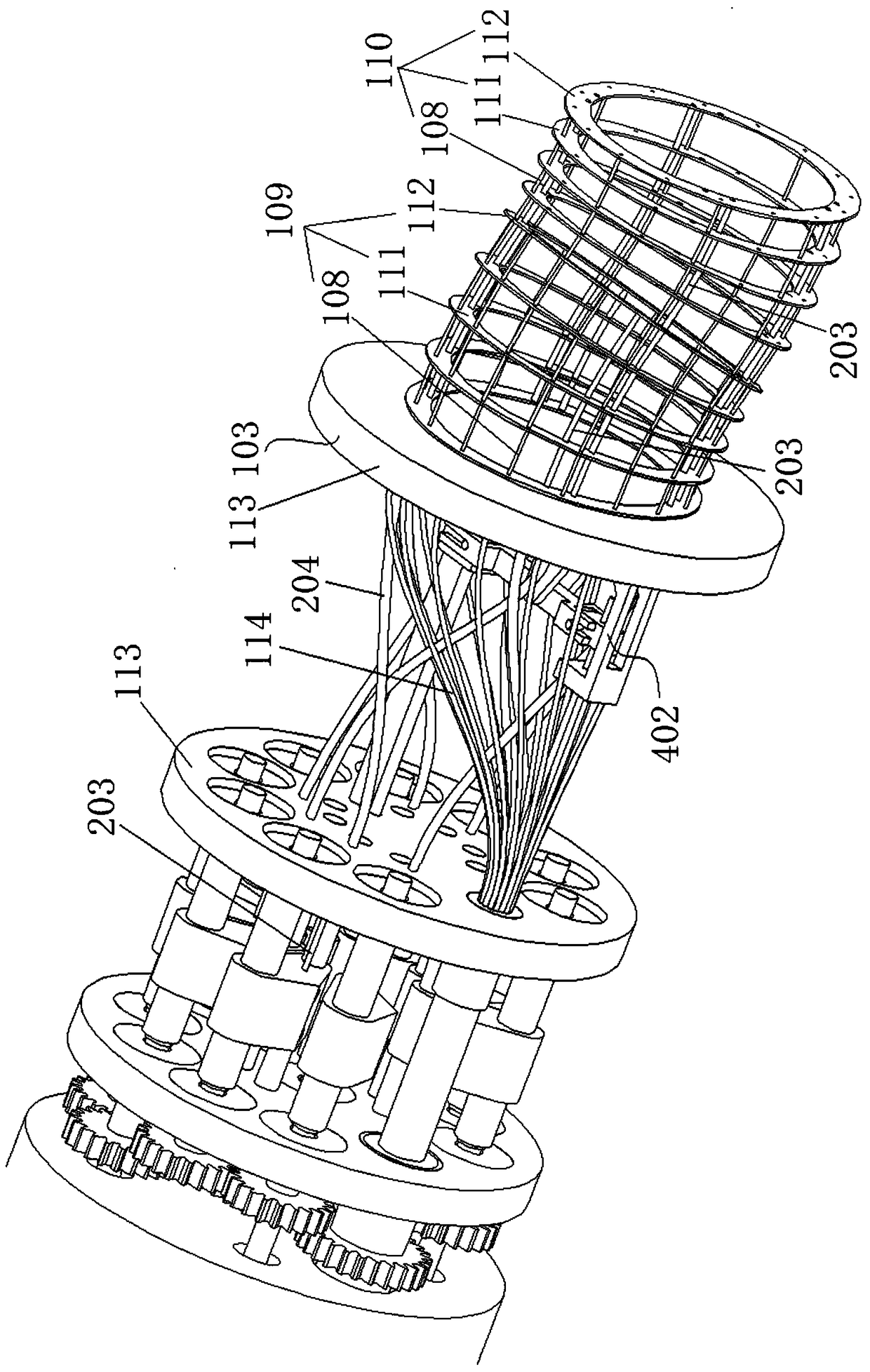
[0031] The flexible continuum structure 10 of the present invention includes a distal structure 101 (such as figure 2 shown), the proximal structure 102 and the middle connector 103, wherein the distal structure 101 is associated with the proximal structure 102 through the middle connector 103; the drive unit 20 is associated with the proximal structure 102, when the drive unit 20 When the proximal structural body 102 is driven to bend in any direction, the distal structural body 101 is correspondingly bent in the opposite direction. Such as figure 2 As shown, the distal structure 101 includes two distal segments 104 , 105 , each distal segment 104 , 105 includes a distal spacer disc 106 , a distal fixation disc 107 and a struc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More