

Plane joint robot with length of arms capable of being adjusted
A planar joint and adjustable technology, applied in the field of robotics, can solve the problems of fixed working space and inability to adapt to various working space requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The structure and principle of the planar joint robot with adjustable length arm of the present invention will be described in detail below with reference to the drawings and embodiments.
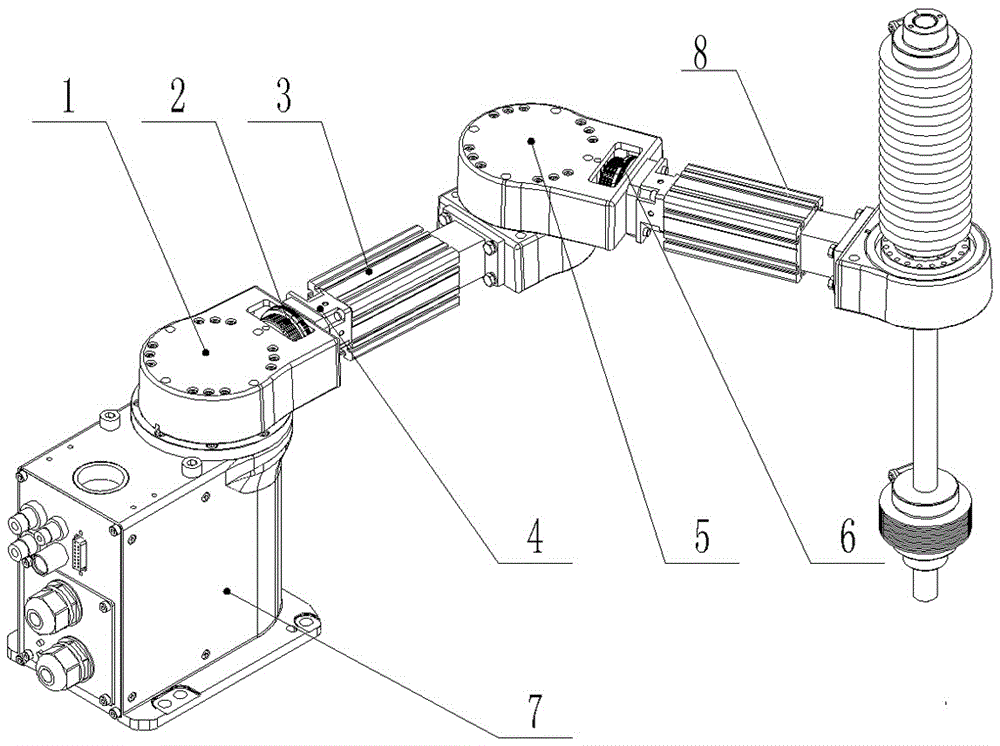
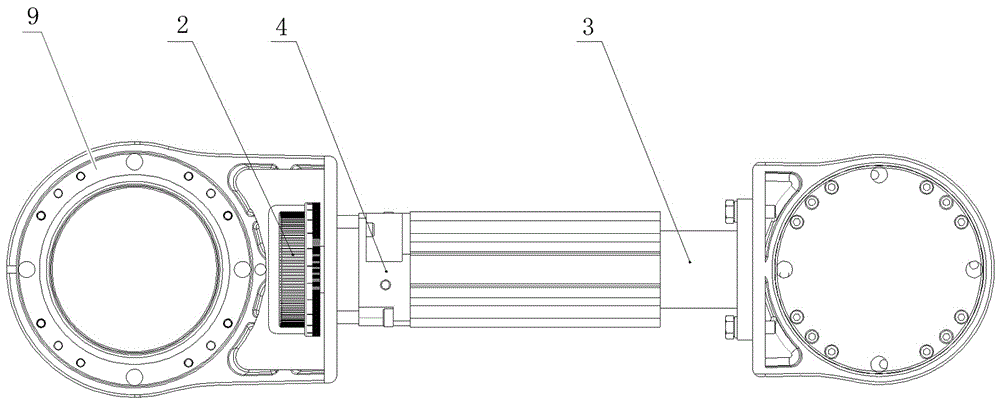
[0012] Such as figure 1 As shown, the planar joint robot with adjustable length arm of the present invention includes a power part 7, a first horizontal rotating arm and a second horizontal rotating arm, wherein the first horizontal rotating arm and the second horizontal rotating arm have the same structure. Such as figure 1 and 2 As shown, the first horizontal rotating arm includes a first horizontal shaft 1, a first length adjustment wheel 2, a first telescopic link 3 and an electronic brake 4, and the first length adjustment wheel 2 and the first telescopic link 3 pass through the link The internal ball screw is connected, and the electronic brake 4 is fixed together with the joint of the first horizontal shaft 1 and the first telescopic connecting rod 3 through bolts.
[0013]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More