

Path Planning Method for Mobile Robots Based on Learning Model of Dynamic Motion Primitives
A mobile robot and dynamic motion technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of poor real-time performance and single task of mobile robots, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to further illustrate the technical scheme of the present invention, below in conjunction with Figure 1-5 The present invention will be described in detail.
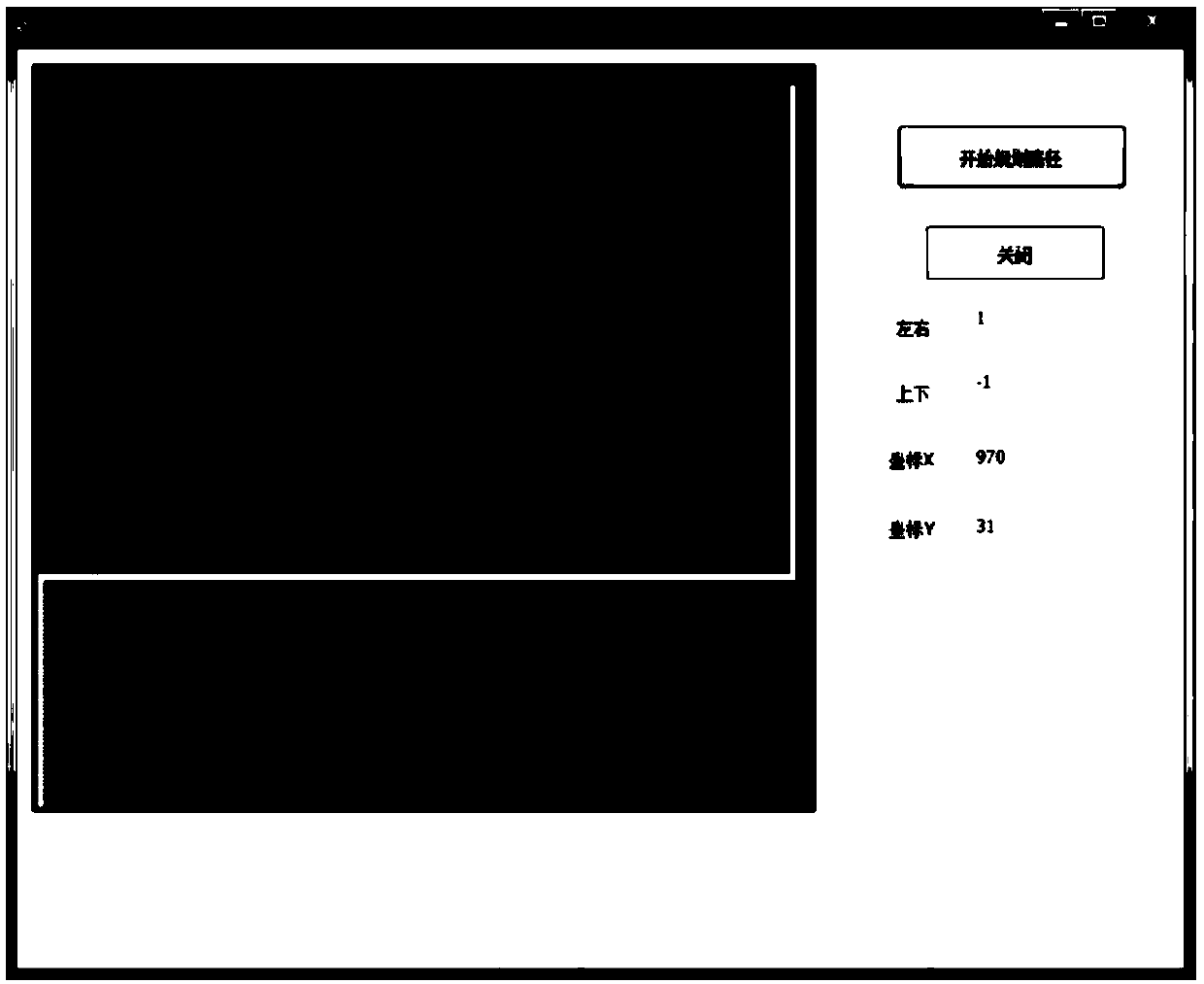
[0060] Step 1: Simulate the two-dimensional environment interface of the robot movement, the robot on the interface is replaced by a small solid circle, and the obstacles are various plane figures; set the two-dimensional environment interface of the robot movement as a square (both length and width are 1m), The robot is replaced by a small solid circle with a diameter of 5mm.
[0061] Step 2: Use OPENCV (Open Source Computer Vision Library) to realize the control of the robot by the handle, so that the robot can avoid collision with obstacles from the starting point to reach the target point;
[0062] Step 2-1: Write a host computer software based on the MFC (Microsoft Foundation Classes) interface. This software can read the data of the robot handle. When the handle is pushed up and down or left and r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More