

Ground autonomous mobile robot safety navigation method based on formal description
A technology of formal description and navigation method, which is applied in the field of combination of robot navigation and hybrid system formal verification, can solve problems such as hybrid systems, and achieve the effect of complete security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
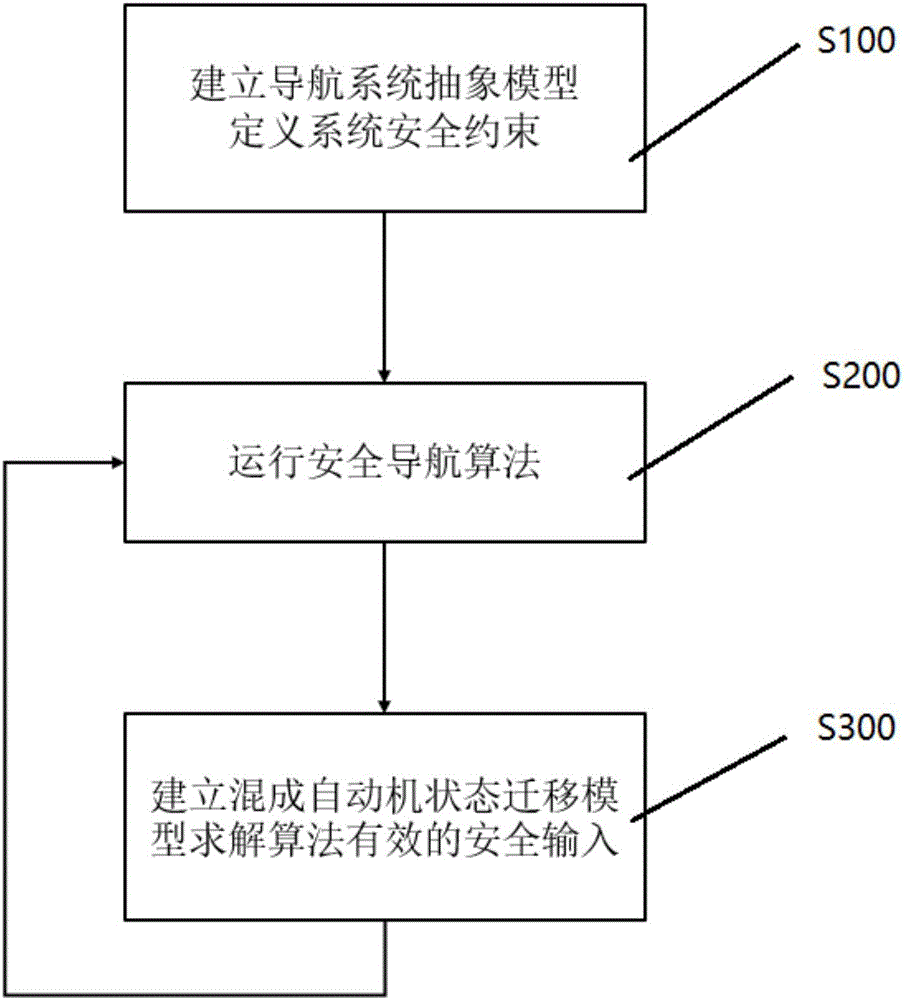
[0040] A method for robot autonomous safe navigation based on formal description, comprising the following steps:
[0041] Step 1: Abstract modeling of the robot navigation system, and formalize the safety properties that it needs to meet; Step 2: Use formal language to describe the robot safety navigation algorithm;
[0042] Step 3: Establish the state transition model of the robot navigation system, and determine the safety property at any time through formal calculation
[0043] control input, and predict and update the motion state of the robot.
[0044] Further, the process of step 1 is as follows:
[0045] 1) The trajectory of the abstract robot is a segmented straight line, and the motion state model of the robot is:
[0046]
[0047] In the formula Indicates the position of the robot in the two-dimensional plane, and Respectively Components in the x, y direction;
[0048] In the formula Indicates the speed of the robot in the two-dimensional plane, v ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More