

A Safe Navigation Method for Ground Autonomous Mobile Robots Based on Formal Description
A formal description and autonomous movement technology, applied in navigation calculation tools, two-dimensional position/course control, instruments, etc., can solve problems such as hybrid systems and achieve complete safety effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
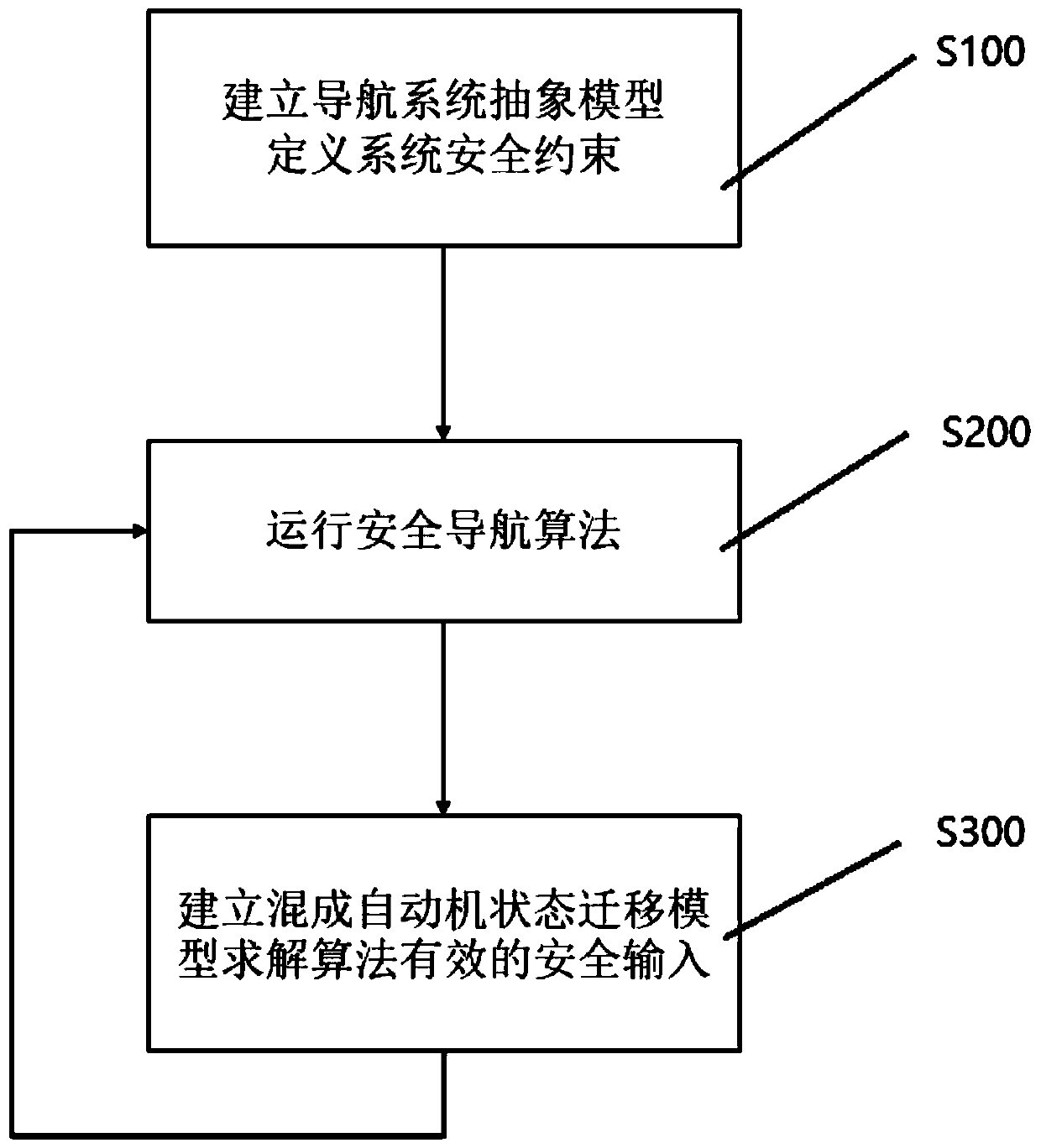
[0040] A method for robot autonomous safe navigation based on formal description, comprising the following steps:
[0041] Step 1: Abstract modeling of the robot navigation system, and formalize the safety properties that it needs to meet; Step 2: Use formal language to describe the robot safety navigation algorithm;
[0042] Step 3: Establish the state transition model of the robot navigation system, and determine the safety property at any time through formal calculation
[0043] control input, and predict and update the motion state of the robot.
[0044] Further, the process of step 1 is as follows:
[0045] 1) The trajectory of the abstract robot is a segmented straight line, and the motion state model of the robot is:
[0046]
[0047] In the formula Indicates the position of the robot in the two-dimensional plane, with Respectively Components in the x, y direction;
[0048] In the formula Indicates the speed of the robot in the two-dimensional plane, v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More