

A Physical Platform for Hybrid Inertial Navigation System
A technology of inertial navigation system and physical platform, applied in the field of physical platform, platform design and control of hybrid inertial navigation system, can solve the problems of complex platform structure, large number of electromechanical components and analog circuits, etc., to simplify the mechanical structure and avoid The brush is easy to wear and the effect of high control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
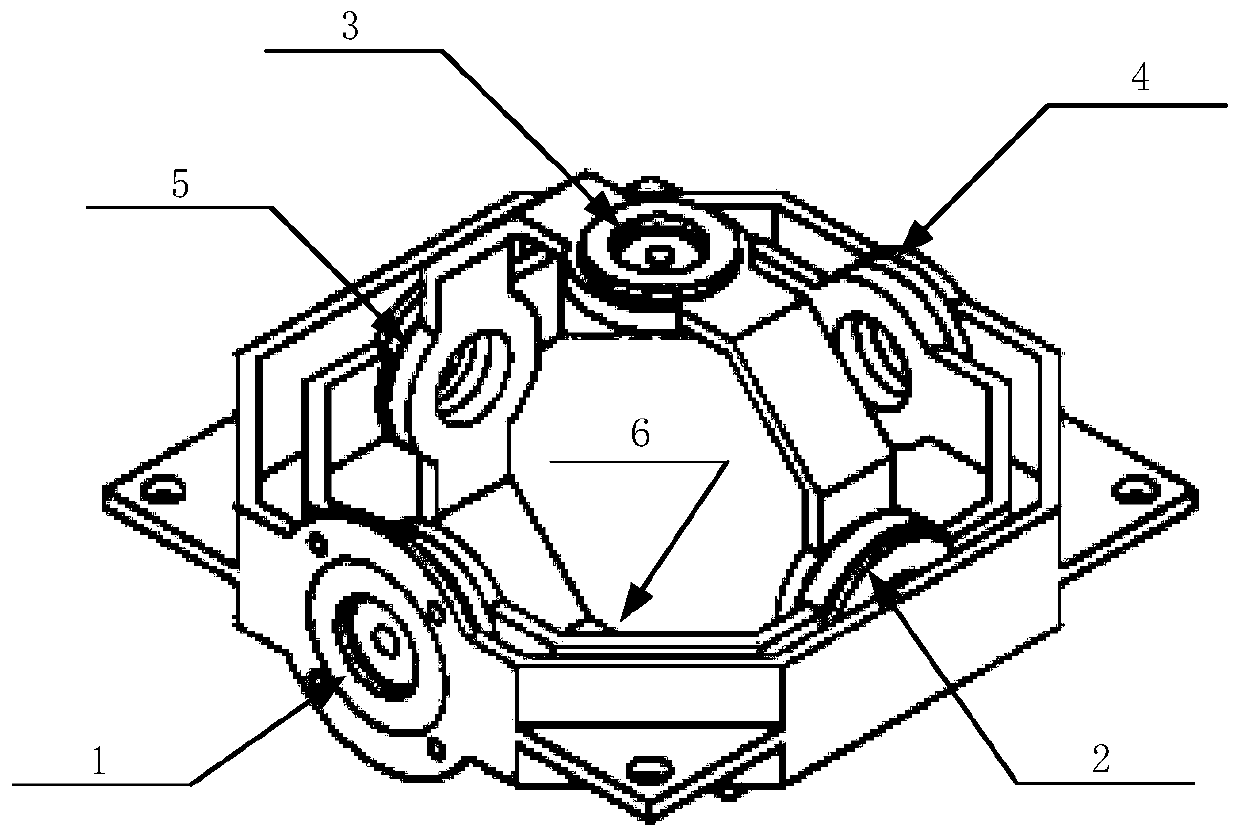
[0023] According to different application occasions, the physical platform of the hybrid inertial navigation system can be in the form of three frames, double frames or single frames in structure. The three-frame platform can isolate the angular motion of the carrier in all directions, which is more advantageous in applications where the attitude movement of the carrier is relatively flexible. The following takes a three-frame platform as an example to make a specific introduction. figure 1 It is a schematic diagram of a three-frame platform structure. The inner frame axis is the azimuth axis Z, the middle frame axis is the pitch axis X, and the outer frame axis is the roll axis Y. A DC brushless motor and a grating are installed on each frame, a conductive slip ring is installed at one end of the grating of the inner frame, and flexible wires...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More