

Unmanned ship movement control system and method
A technology of motion control system and unmanned ship, applied in the direction of control/regulation system, non-electric variable control, two-dimensional position/channel control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
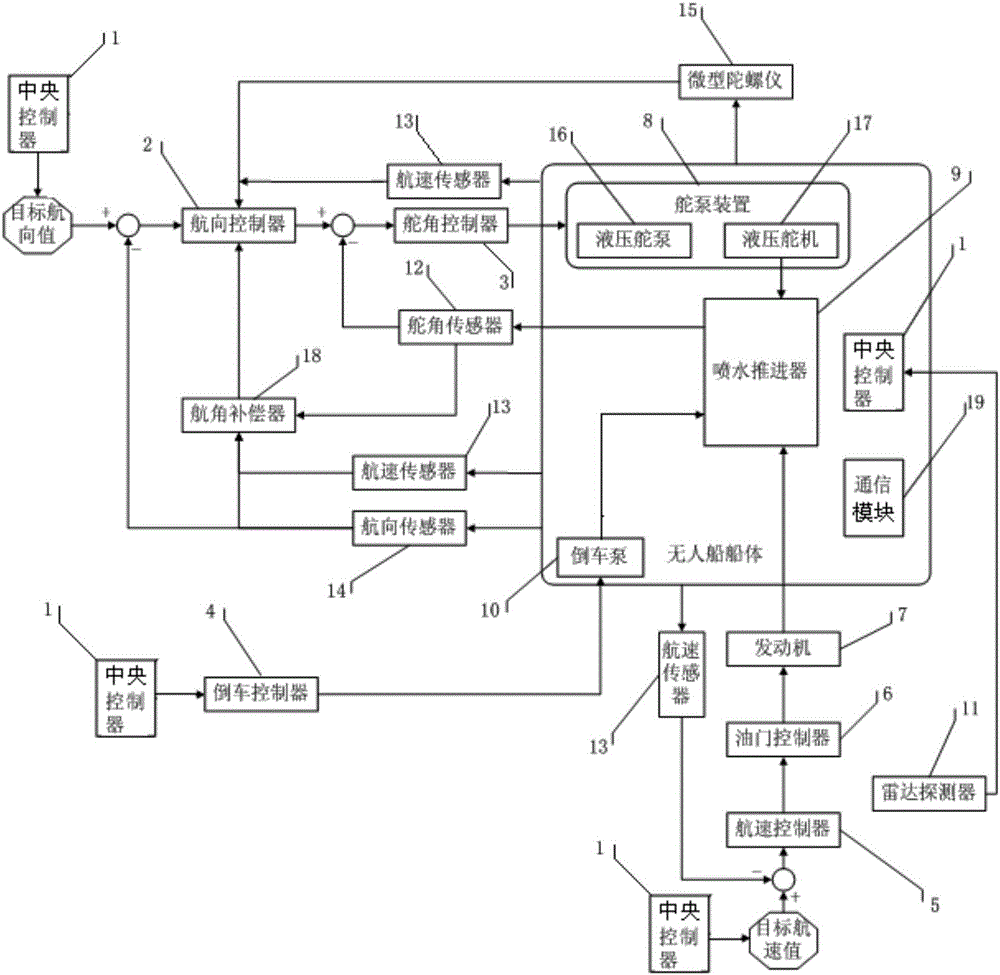
[0023] Such as figure 1 As shown, an unmanned ship motion control system includes a control module, a power module, an information collection module and a communication module 19; the control module includes a central controller 1, a heading controller 2, a rudder angle controller 3, and a reversing controller 4 , speed controller 5 and throttle controller 6, central controller 1 is connected with heading controller 2, reversing controller 4 and speed controller 5 respectively, heading controller 2 is connected with rudder angle controller 3, and speed controller 5 is connected with The throttle controller 6 is connected; the information collection module includes a rudder angle sensor 12, a speed sensor 13, a heading sensor 14 and a miniature gyroscope 15 for collecting unmanned ship navigation data, and a radar detector 11 and a rudder angle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More