

Method and system for automatic inspection of unmanned aerial vehicles
An automatic inspection and unmanned aerial vehicle technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problems of low flight accuracy and low degree of automation, and achieve the effect of improving flight accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
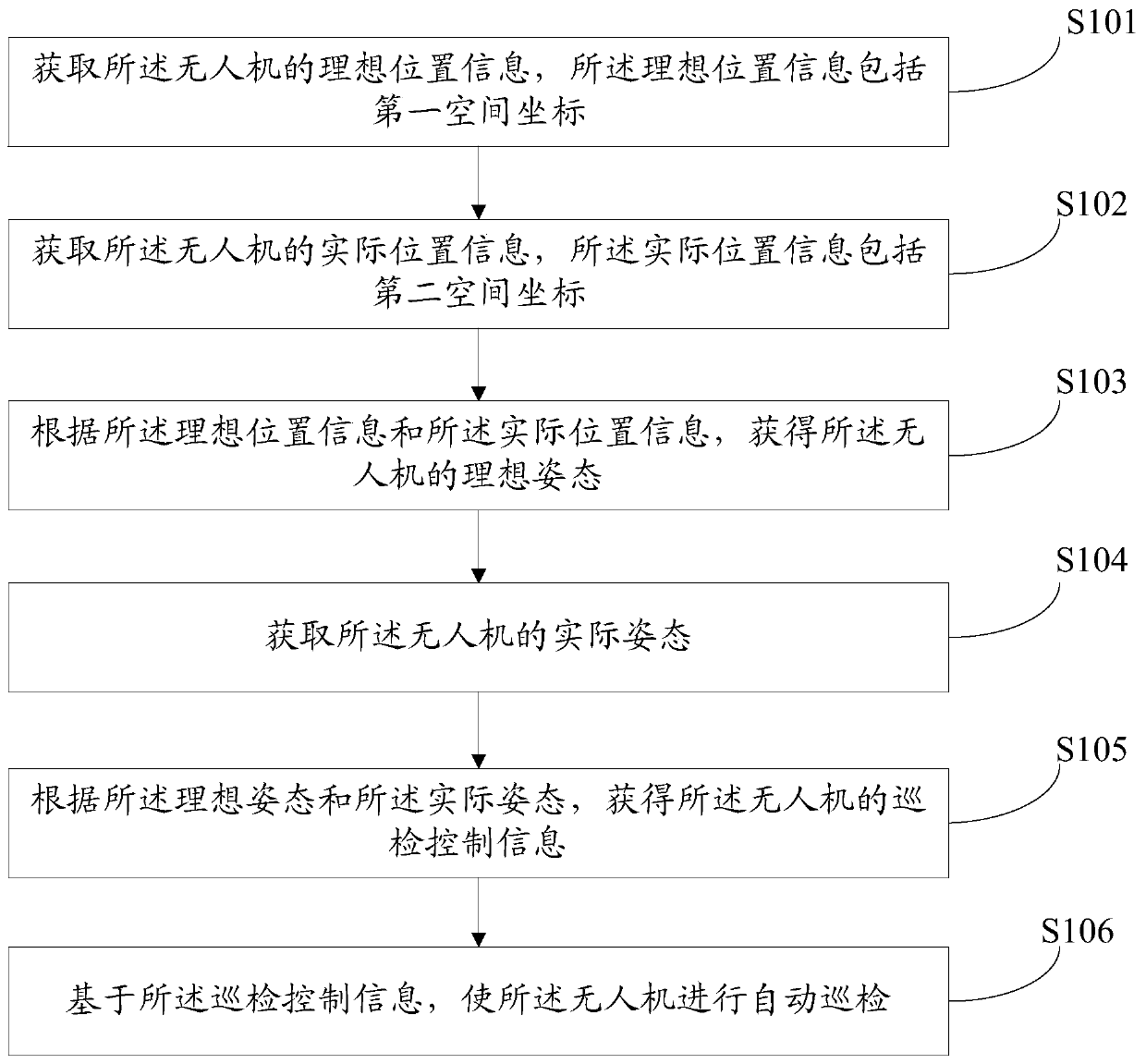
[0071] This embodiment provides an automatic inspection method for drones, please refer to figure 1 , the method includes:
[0072] Step S101, acquiring ideal position information of the drone, the ideal position information including first spatial coordinates;
[0073] Step S102, acquiring actual location information of the drone, where the actual location information includes second space coordinates;
[0074] Step S103, according to the ideal position information and the actual position information, obtain the ideal posture of the UAV;
[0075] Step S104, acquiring the actual attitude of the drone;
[0076] Step S105, according to the ideal posture and the actual posture, obtain the inspection control information of the UAV;
[0077] Step S106, based on the inspection control information, enable the drone to perform automatic inspection.
[0078] It should be noted that the ideal position information of the UAV refers to a position expected to be reached by the UAV, and...
Embodiment 2
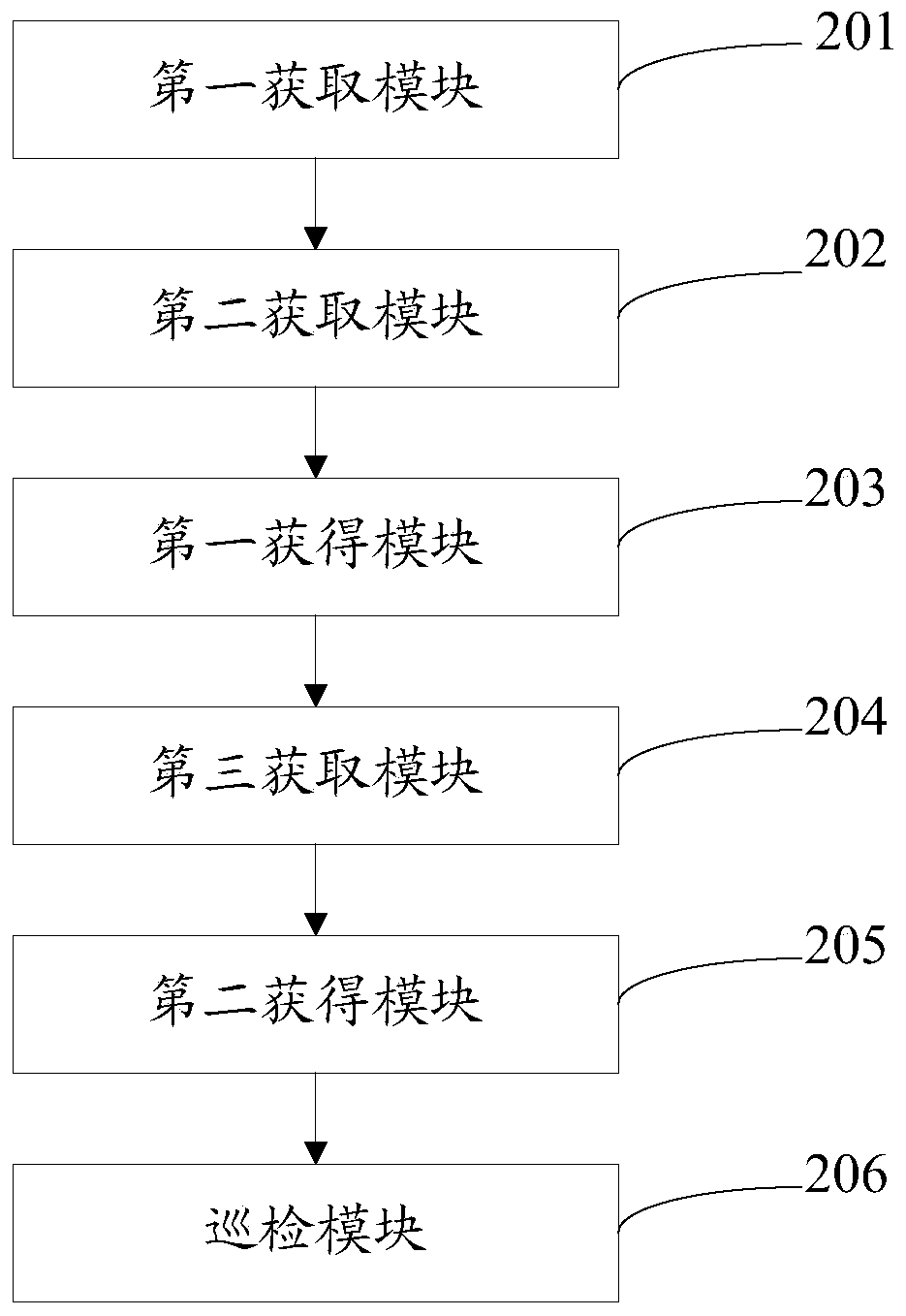
[0113] This embodiment provides a UAV automatic inspection system, please refer to figure 2 , the system includes:
[0114] The first acquiring module 201 is configured to acquire ideal position information of the drone, where the ideal position information includes first spatial coordinates;
[0115] The second acquiring module 202 is configured to acquire the actual location information of the drone, the actual location information including the second space coordinates;
[0116] The first obtaining module 203 is used to obtain the ideal attitude of the UAV according to the ideal position information and the actual position information;
[0117] The third obtaining module 204 is used to obtain the actual attitude of the drone;
[0118] The second obtaining module 205 is used to obtain the inspection control information of the UAV according to the ideal posture and the actual posture;
[0119] The inspection module 206 is configured to enable the drone to perform automati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More