Method and system for calibrating height difference of inertial navigation prism
An inertial navigation system and altitude difference technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of affecting the flight effect of rockets, inconvenient use, poor versatility, etc., to achieve good expansion of application value, improve flight accuracy, and reduce alignment The effect of deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0073] see figure 1 As shown, the embodiment of the present invention provides a method for calibrating the height difference of the inertial navigation prism, including the following steps:
[0074] Fasten the inertial group navigation system (referred to as the inertial navigation system) equipped with the inertial navigation prism on the turntable, and observe the inertial navigation prism through the autocollimation theodolite (referred to as theodolite for short);
[0075] By controlling the computer to automatically control the rotation of the turntable, the inertial navigation prism can be rotated to different positions, and the theodolite and the inertial navigation prism can be aligned;
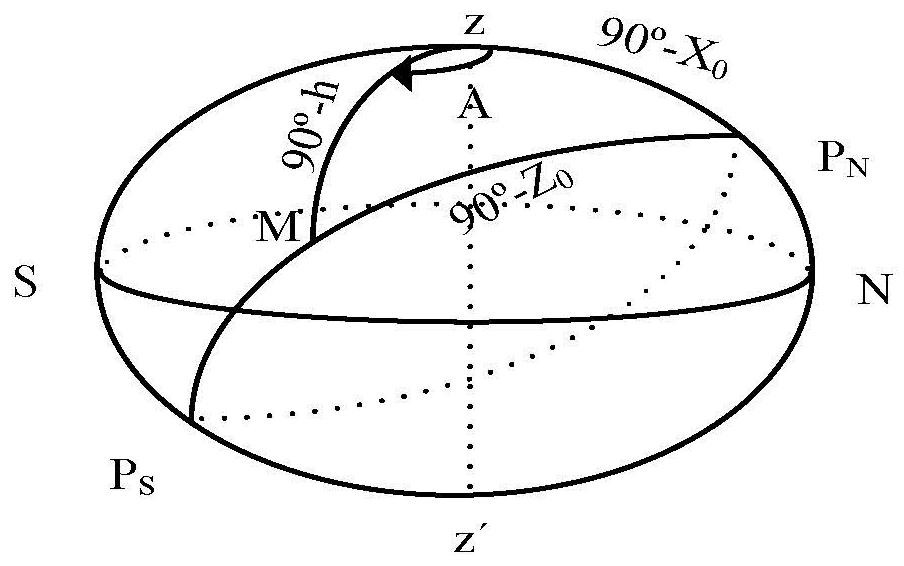
[0076] The collimation line between the theodolite and the inertial navigation prism is extended to infinity, and it is regarded as an observation celestial body σ in astronomical navigation and positioning 0 , the observation point of the theodolite is regarded as a circle point of...
Embodiment 2
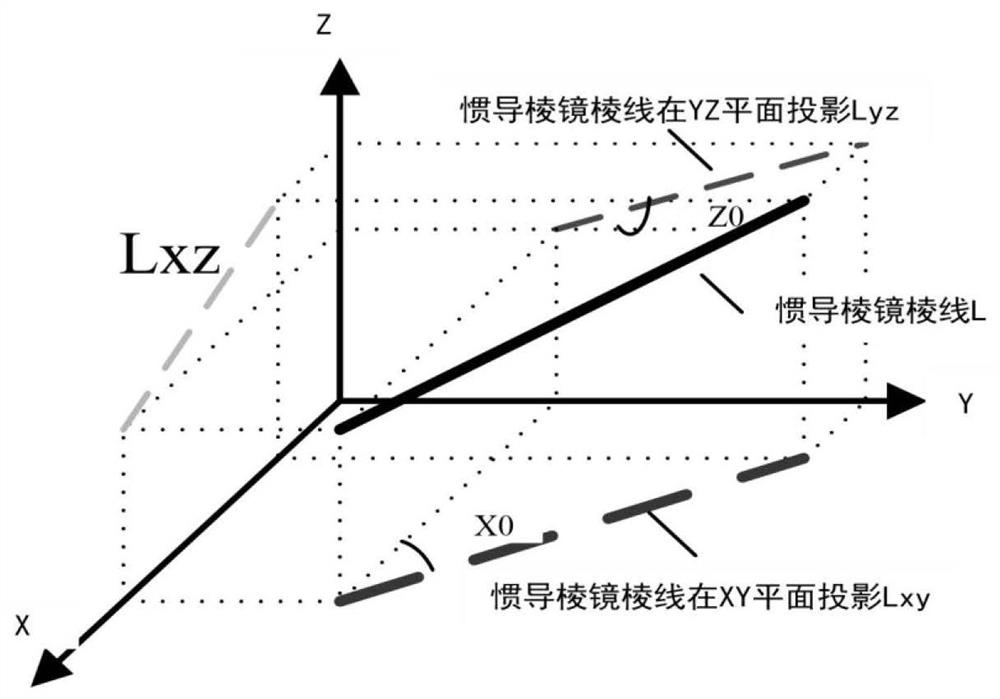
[0097] 1. Inertial navigation prism installation deviation
[0098] Inertial navigation system and rocket launch coordinate system XYZ such as figure 1 As shown, the Z axis is vertical to the sky, the X axis is the shooting direction, and the Y axis is the yaw. Plane projection, Lxz means the projection of the inertial prism ridgeline on the XZ plane, considering that the projection of the INS prism ridgeline on the XZ plane has no effect on the azimuth alignment, it is ignored. The installation deviation of the inertial navigation prism ridgeline in the inertial navigation coordinate system is determined by two parameters (X 0 ,Z 0 )To represent. x 0 It is called the installation deviation of the inertial navigation prism ridgeline rotating around the Z axis, which represents the non-perpendicularity between the inertial navigation prism ridgeline and the X-axis of the inertial navigation coordinate system, and the right-hand rule is positive for counterclockwise rotation...
Embodiment 3
[0125] The inertial navigation prism height difference calibration system consists of a position rate turntable (hereinafter referred to as turntable), a theodolite and a control computer. Such as Figure 4 The control computer shown in the figure controls the rotation of the turntable, the theodolite observes the inertial navigation prism, and the inertial navigation system equipped with the inertial navigation prism is placed on the turntable table, and the Y-axis of the inertial navigation system is vertically toward the ridge line of the angel inertial navigation prism, and the X , Z-axis is in a horizontal state, control the computer to control the turntable to make the inertial navigation prism vertically aligned with the theodolite, read the angle value of the turntable, the pitch angle value of the theodolite and the horizontal azimuth value; secondly control the computer to control the turntable and make the inertial navigation prism align with the left side of the the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



