

Three-dimensional cruise method and system for bridge detection
A bridge detection, three-dimensional technology, applied in three-dimensional position/channel control, control/adjustment systems, instruments, etc., can solve the problems of low detection efficiency, prone to safety accidents, easy to miss detection, etc., to improve safety and improve positioning. Accurate, easy-to-use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and preferred embodiments.
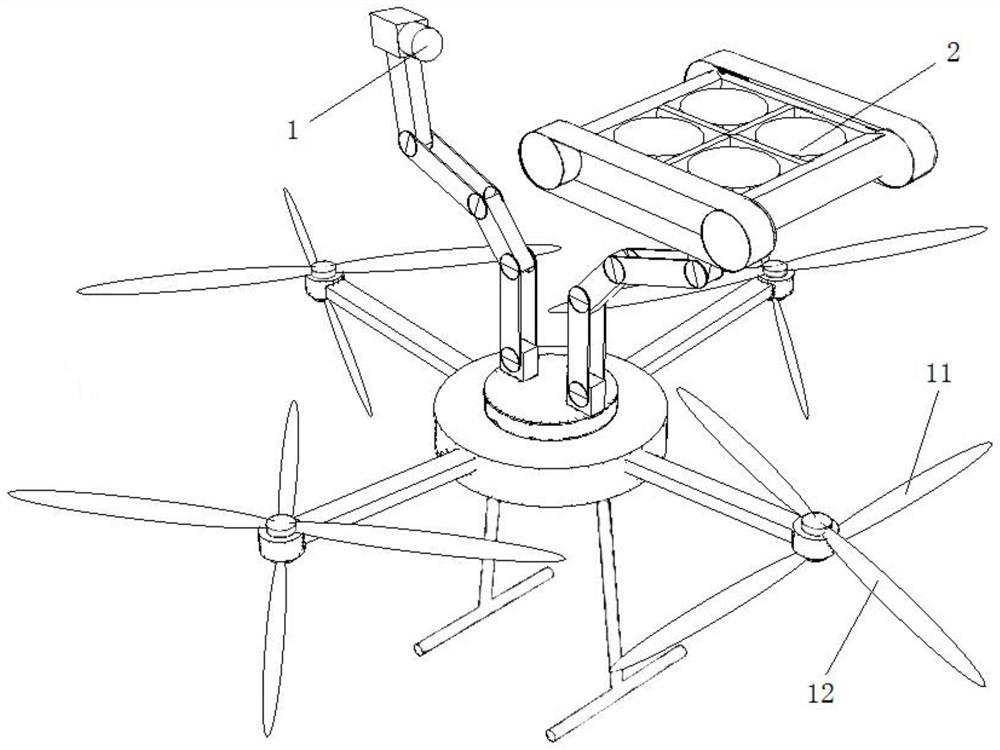
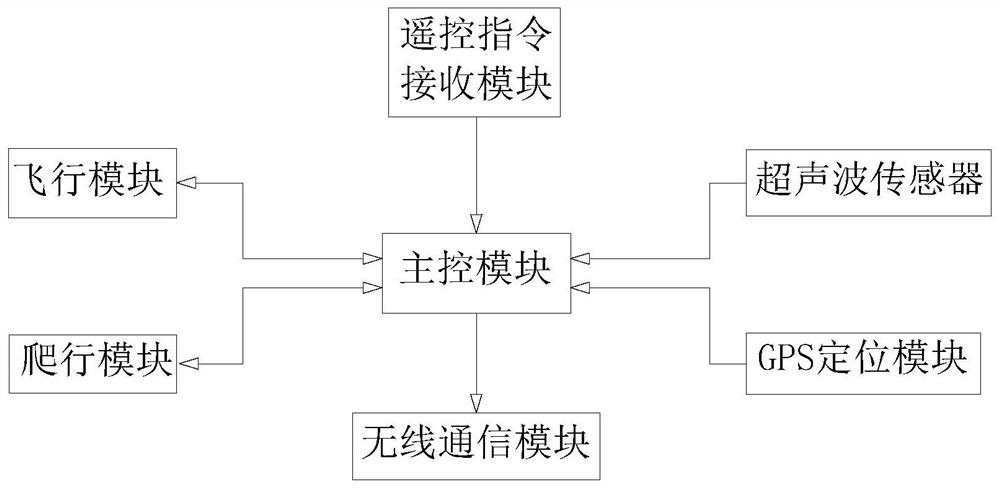
[0028] A 3D cruise method for bridge inspection using a flying-climbing amphibious robot such as figure 1 and figure 2 As shown, the flying-climbing amphibious robot includes a flight module and a crawling module 2, the crawling module 2 is provided with an adsorption device, the main control module of the flying-climbing amphibious robot is connected with a GPS positioning module, and the flying-climbing amphibious robot Equipped with a bridge detection device 1, comprising the following steps:
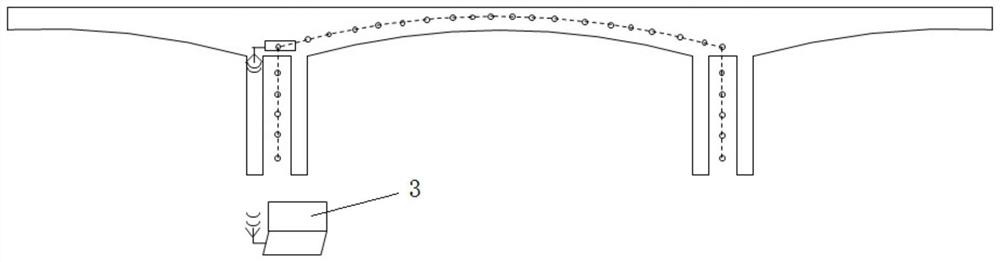
[0029] Step 1: According to the design drawings of the bridge, build a 3D model of the bridge in the 3D spatial coordinate system;
[0030] Step 2: Specify the area to be inspected in the 3D model of the bridge, and plan the corresponding inspection points on the area to be inspected according to the geometric shape of the area to be ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More