

Turning coordination control method and device of plurality of agricultural robots
A technology of coordinated control and robotics, applied in the field of robotics, can solve the problems of not greatly improving work efficiency, difficult to solve labor shortage, affecting work efficiency, etc., to achieve the effect of improving labor work efficiency, improving land utilization, and reducing land use space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
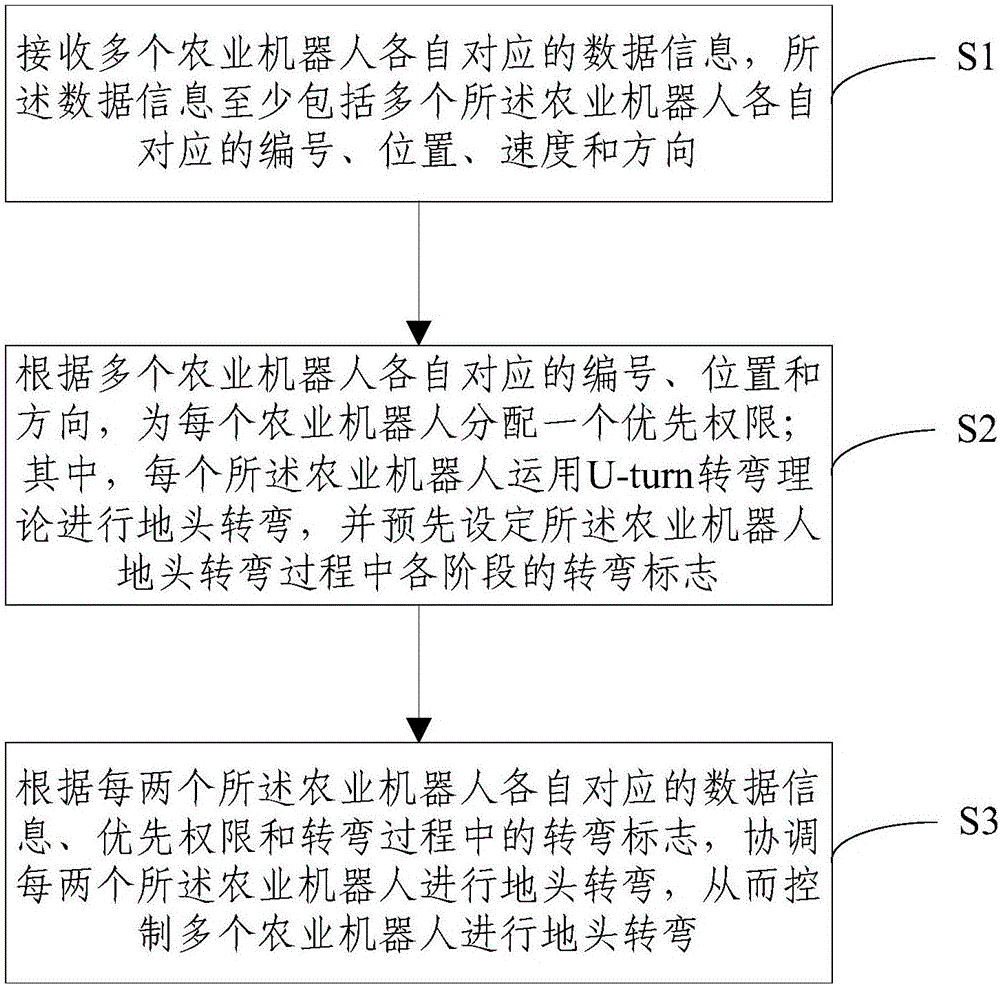
[0055] figure 1 It is a schematic flow chart of a multi-agricultural robot formation control method provided according to an embodiment of the present invention, such as figure 1 As shown, the method includes: step S1, receiving data information corresponding to a plurality of agricultural robots, the data information at least including the number, position, speed and direction corresponding to each of the plurality of agricultural robots; step S2, according to the plurality of agricultural robots The respective numbers, positions and directions of the agricultural robots assign a priority authority to each of the agricultural robots; wherein, each of the agricultural robots uses the U-turn turning theory to perform headland turns, and pre-sets the agricultural The robot uses the U-turn turning theory to carry out the turning marks at each stage in the turning process at the headland; step S3, according to the data information corresponding to each two agricultural robots, the...
Embodiment 2
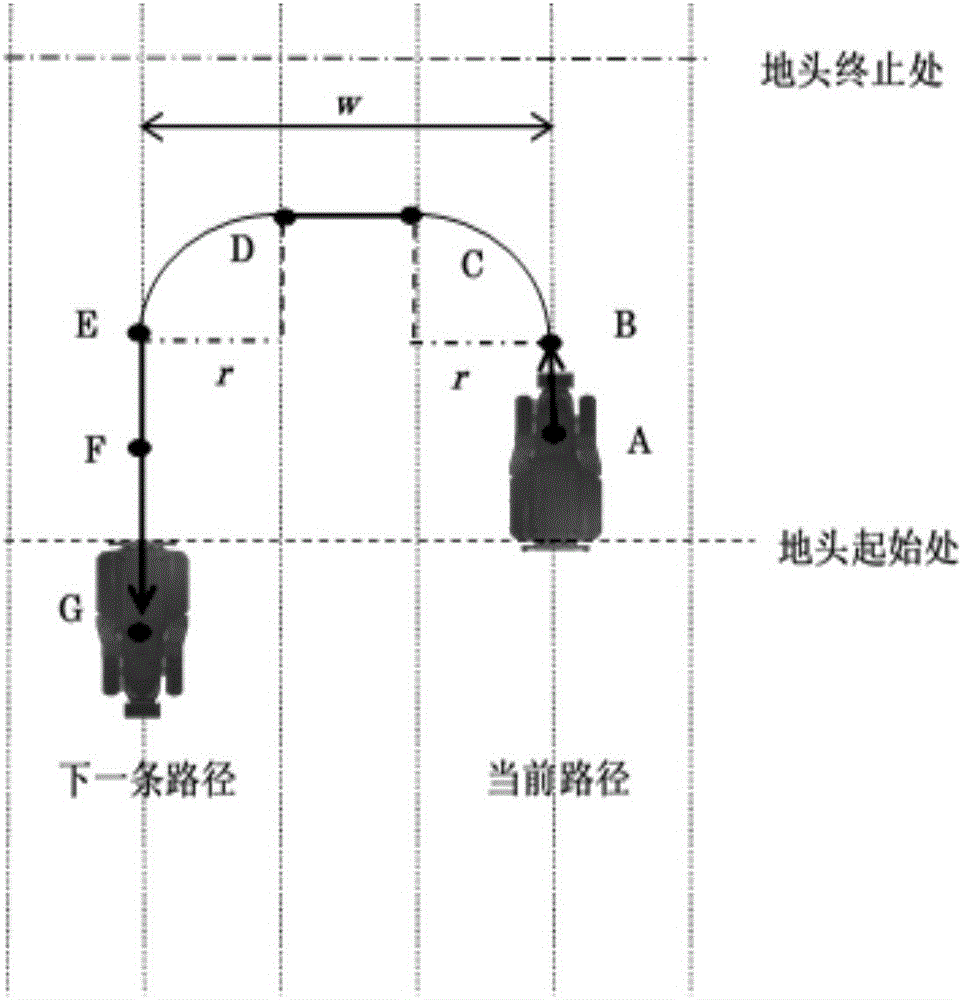
[0076] image 3 It is a schematic diagram of an agricultural robot U-turn turning provided according to an embodiment of the present invention, such as image 3 As shown, the agricultural robot performs a turn at the headland between the beginning of the headland and the end of the headland. The U-turn of the agricultural robot can be divided into six steps, using RT i .T_F to record the turn sign.
[0077] (1) The agricultural robot is working in a straight line (RT i .T_F=0).
[0078] (2) After the straight-line operation of the agricultural robot is completed, the working machine is raised and moves forward from point A to point B (RT i .T_F=1), the agricultural robot turns 90° to point C (RT i .T_F=2).
[0079] (3) Calculate the distance between the current path and the next path, denoted as w, and calculate the turning radius r of the agricultural robot. If w-2ri .T_F=3), if w-2r>0, then the agricultural robot moves forward |w-2r|(RT i .T_F=4).
[0080] (4) The agr...
Embodiment 3
[0085] On the basis of the above embodiments, the turning coordination of multiple agricultural robots can be simplified to the turning coordination between every two agricultural robots. For example, for 4 agricultural robots RT 1 , RT 2 , RT 3 and RT 4 , by controlling RT 2 and RT 3 , RT 3 and RT 4 , RT 1 and RT 3 Wait for the turn coordination of any two agricultural robots, so as to control the turn coordination of multiple agricultural robots.
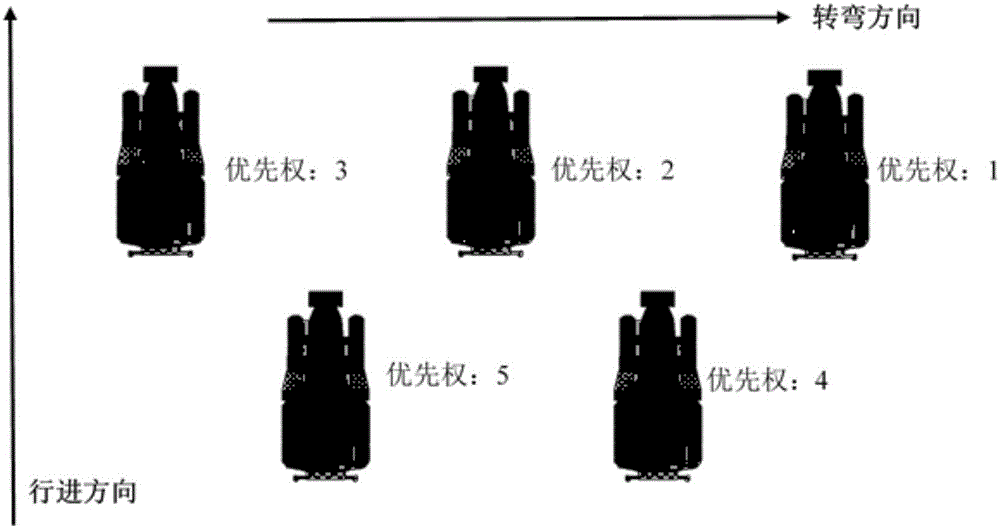
[0086] Figure 4a It is a schematic diagram of multi-agricultural robot turning coordination control provided according to Embodiment 3 of the present invention, as shown in Figure 4a ~ Figure 4e As shown in the figure, there are 4 agricultural robots, numbered RT 1 , RT 2 , RT 3 and RT 4 . 4 agricultural robots turn from the right path to the left path using the U-turn turning theory. The turning direction is as follows: Figure 4a ~ Figure 4e indicated by the middle arrow. where for numbered RT 1 and RT 2 Agr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More