

Human body hip joint wearable type assisting device with RCM three-freedom-degree rotation
A hip joint and wearable technology, which is applied in the field of wearable power-assisted equipment for human hip joints, can solve problems such as inability to rotate, poor rigidity of series mechanisms, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
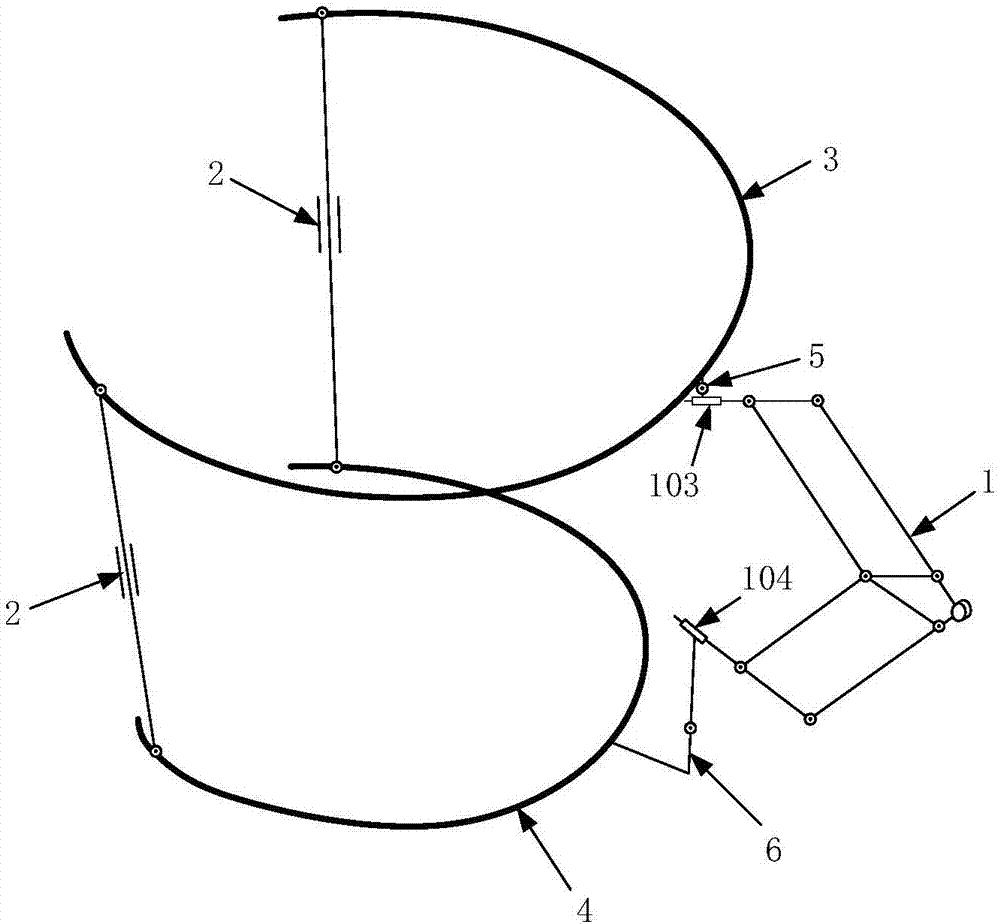
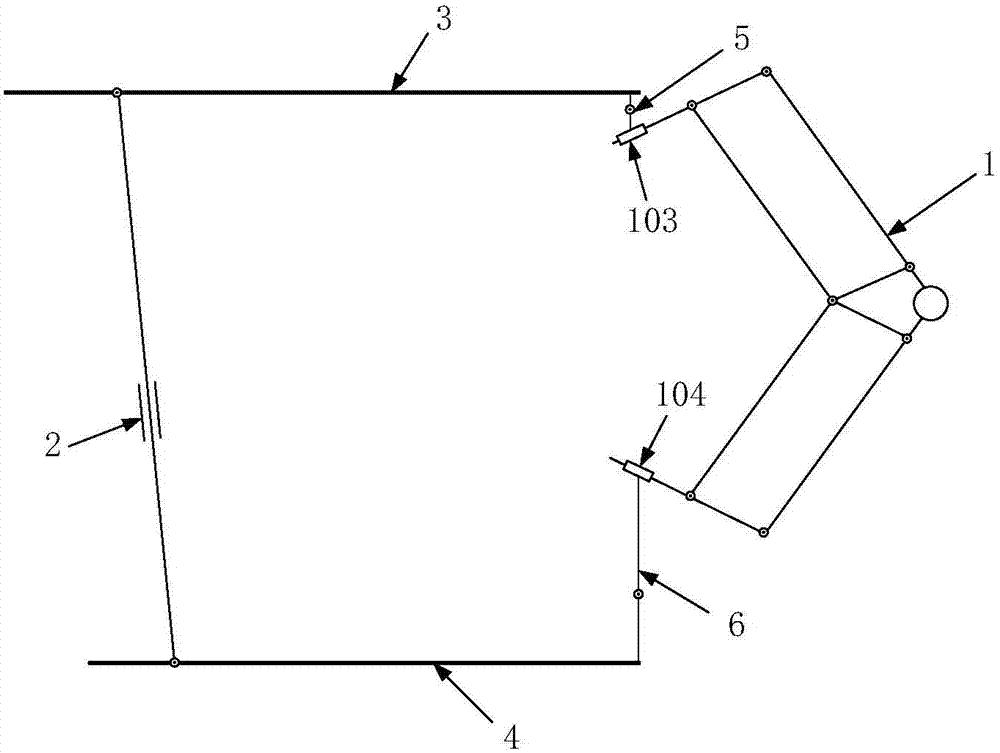
[0027] The present invention is equipped with RCM three-degree-of-freedom human hip joint wearable booster, including a main branch chain 1 and two auxiliary driving branch chains 2, waist bracket 3, leg bracket 4, waist connecting frame 5 and legs part connector 6, such as figure 1 , figure 2 shown.
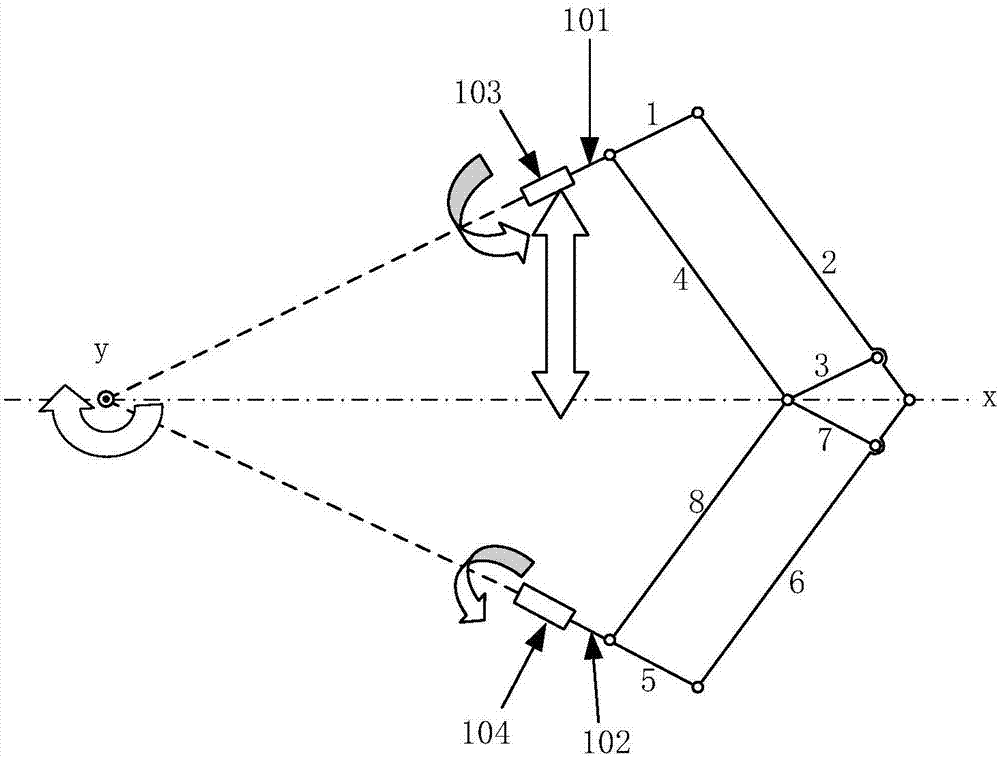
[0028] The main branch chain 1 is evolved from the parallelogram structure of the drawing instrument, so that in the space three-axis coordinate system, the positive direction of the x-axis is the positive direction of the human body; the positive direction of the y-axis is the same as the right direction of the human body, and the positive direction of the z-axis is vertically downward ; then if image 3 , Figure 4 As shown, the main branch chain 1 includes two sets of parallel four-bar structures that are symmetrical with respect to the y-axis; the oppo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More