

Multi-foot-boosting rehabilitation robot
A rehabilitation robot and drive technology, applied in the field of robotics, can solve problems such as low energy efficiency, inability to assist rehabilitation for the elderly and people with lower limb disabilities, and poor balance, so as to improve heart health, stability and safety. , the effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
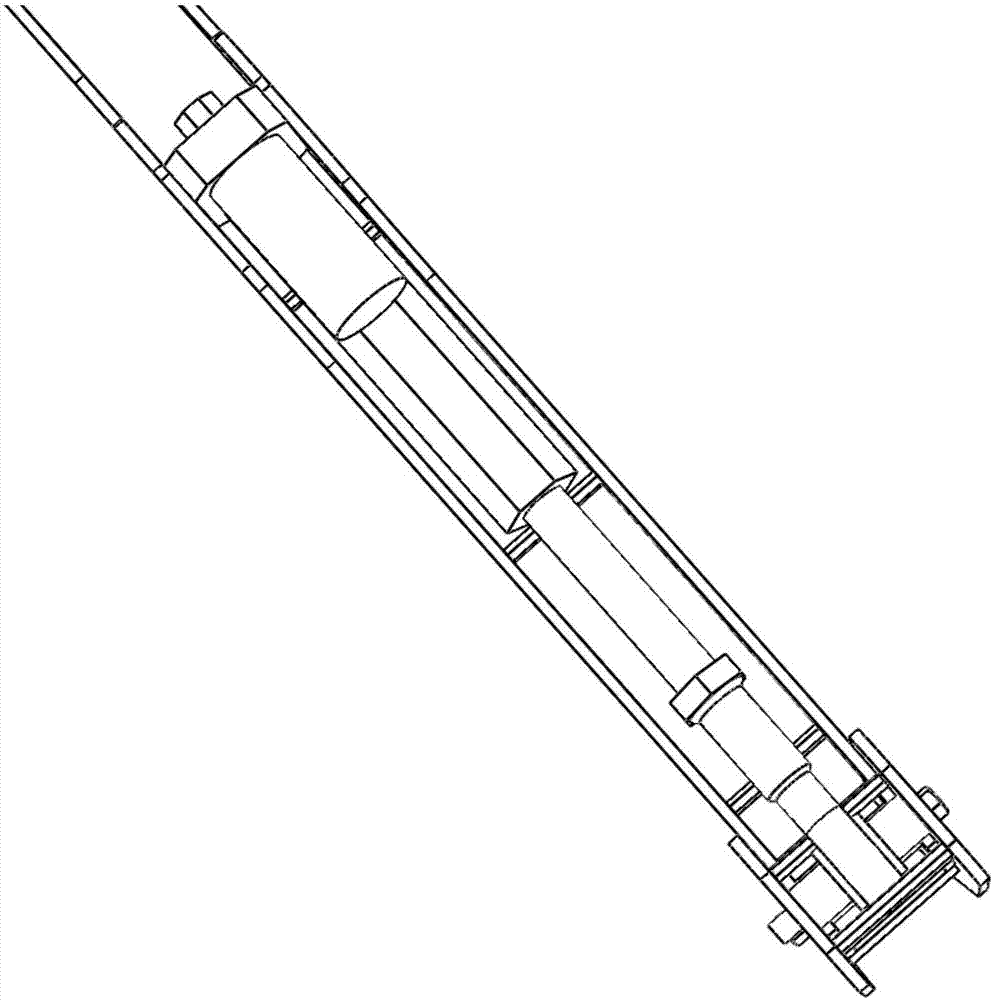
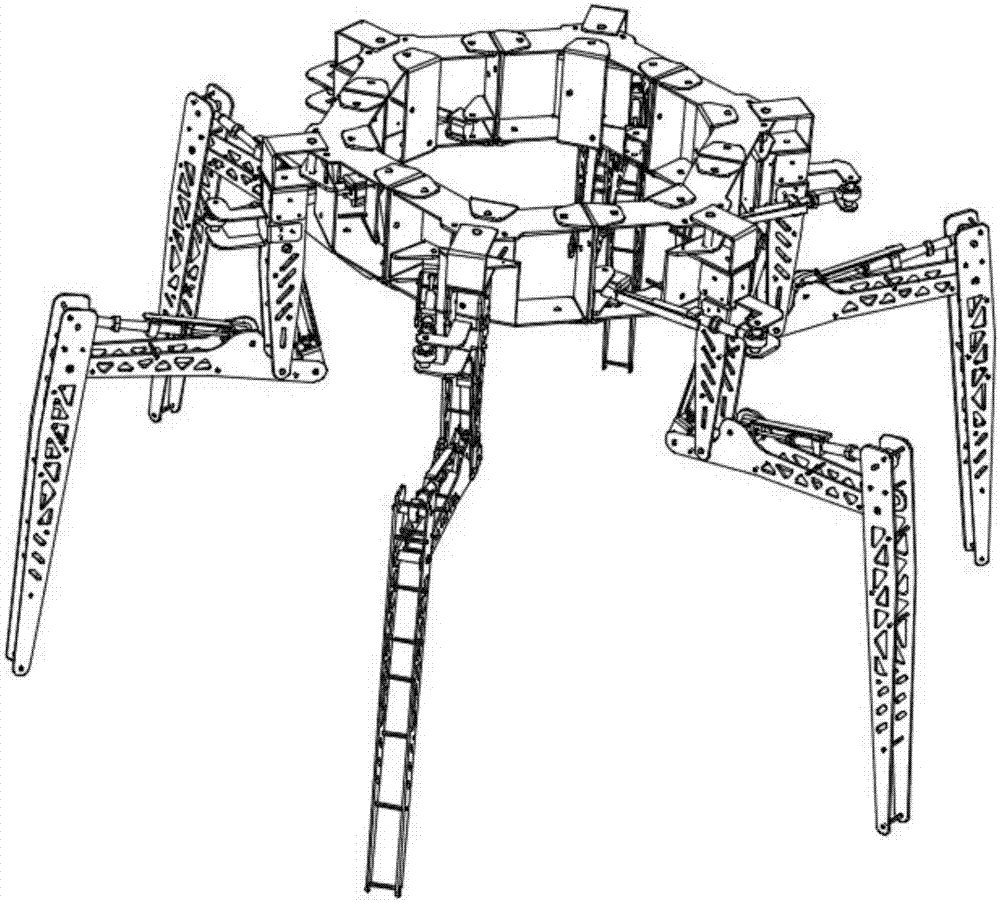
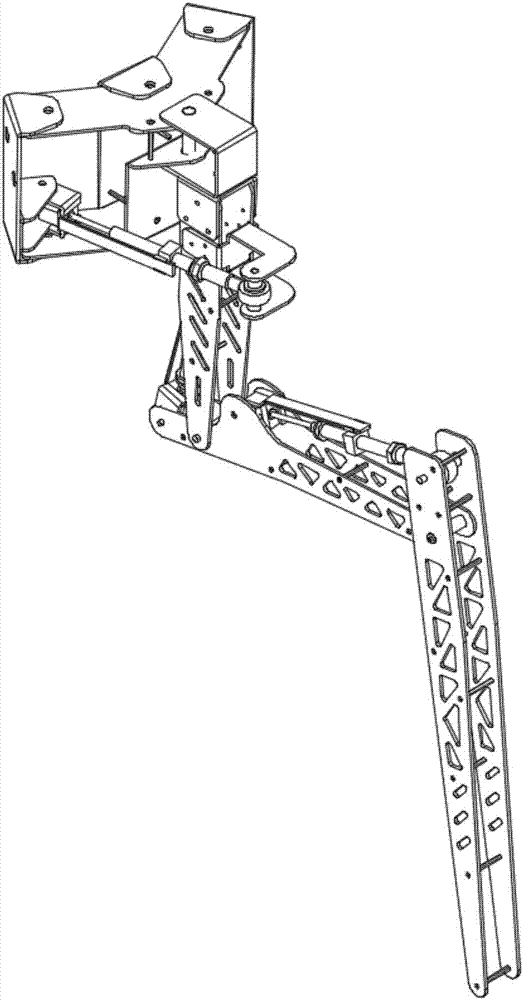
[0031] refer to Figure 1 to Figure 11 , a multi-legged power-assisted rehabilitation robot, the robot includes a belt structure 5 and bionic mechanical legs, two of the belt structures 5 are connected in series to form an annular belt, the belt structure 5 is connected with the bionic mechanical legs, and the bionic mechanical legs Including the proximal leg bone 3, the middle leg bone 1 and the distal leg bone 10, the waist belt structure 5 is connected to the upper end of the proximal leg bone 3 through a lateral swing joint, and the proximal leg bone 3 is connected to the rear end of the middle leg 1 bone end The upper end of the middle leg bone 1 and the distal leg bone 10 is connected by a second bending joint.
[0032] Further, the first bending joint includes a first electric push rod driver 4, a revolving pair connecting the first electric push rod driver and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More