

Variable-diameter pole-climbing robot
A robot and variable diameter technology, applied in the field of robotics, can solve the problems of non-scalability and poor applicability, and achieve the effect of small load capacity, low energy consumption, and reduced power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
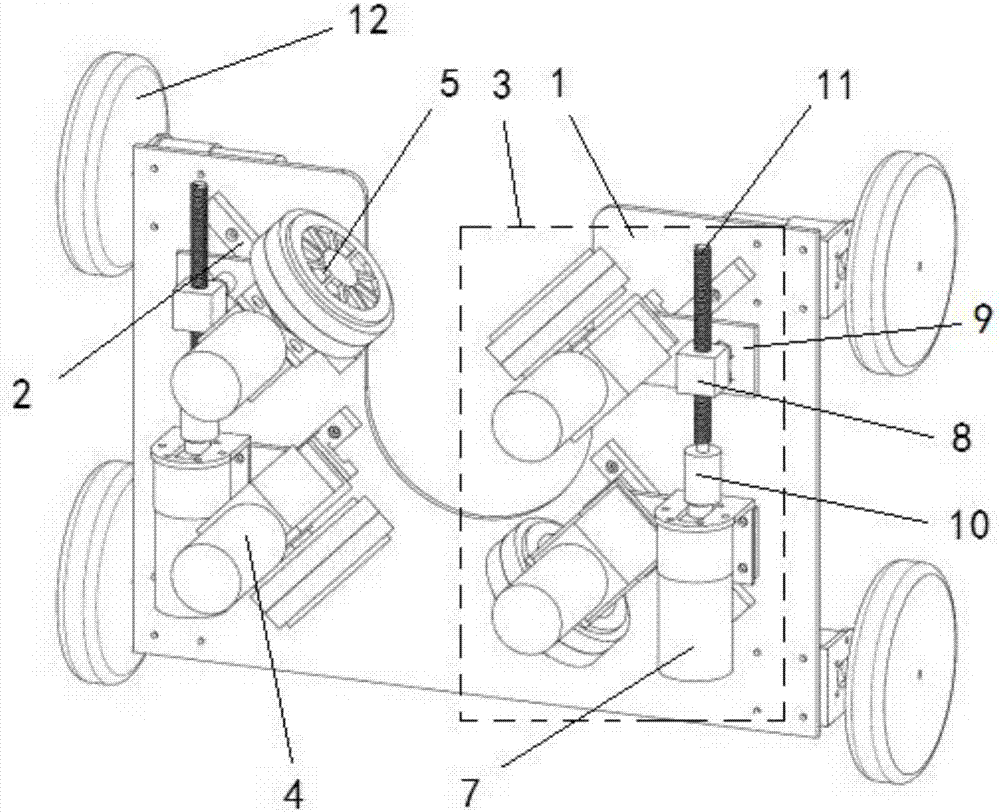
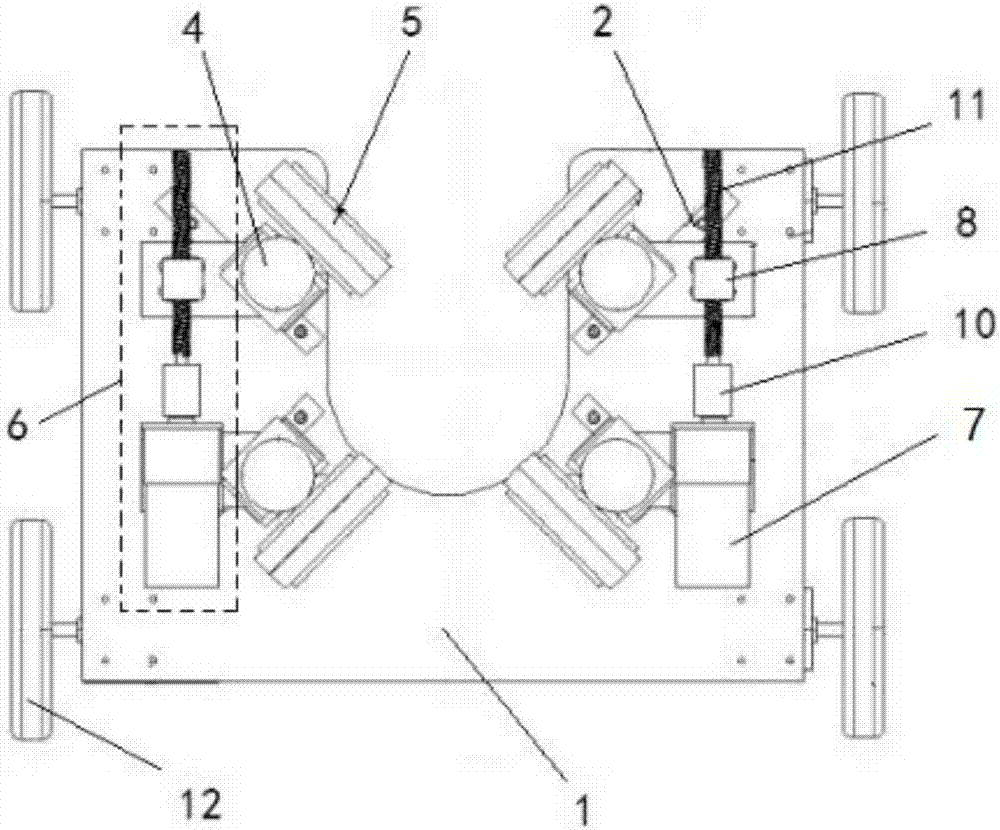
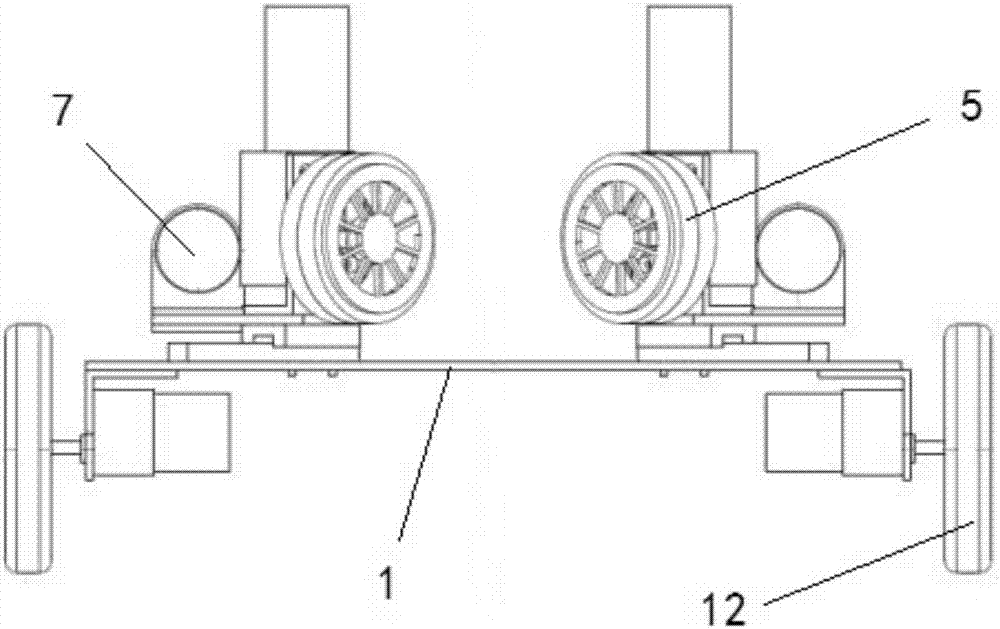
[0021] Such as Figure 1 to Figure 4 As shown, the variable diameter pole climbing robot of the present invention includes a chassis 1, the chassis 1 is provided with a gap for accommodating the pole to be climbed, the guide rail 2 symmetrically arranged on the outer periphery of the gap of the chassis 1 and the clamping rod climbing unit 3 slidingly connected to the guide rail 2 , the clamping pole climbing unit 3 includes a first motor 4 slidingly connected to the guide rail 2, a friction wheel 5 driven by the first motor 4, and a displacement mechanism 6 for driving the first motor 4 to move along the guide rail 2, the displacement mechanism 6 When working, the clamping pole climbing unit 3 moves along the guide rail 2 to the center of the gap in the chassis 1, and the friction wheel 5 clamps the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More