

Trajectory Planning Method for Grinding Workpieces Supported by Robots Based on Offline Programming
An offline programming and trajectory planning technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., to reduce the difficulty of teaching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
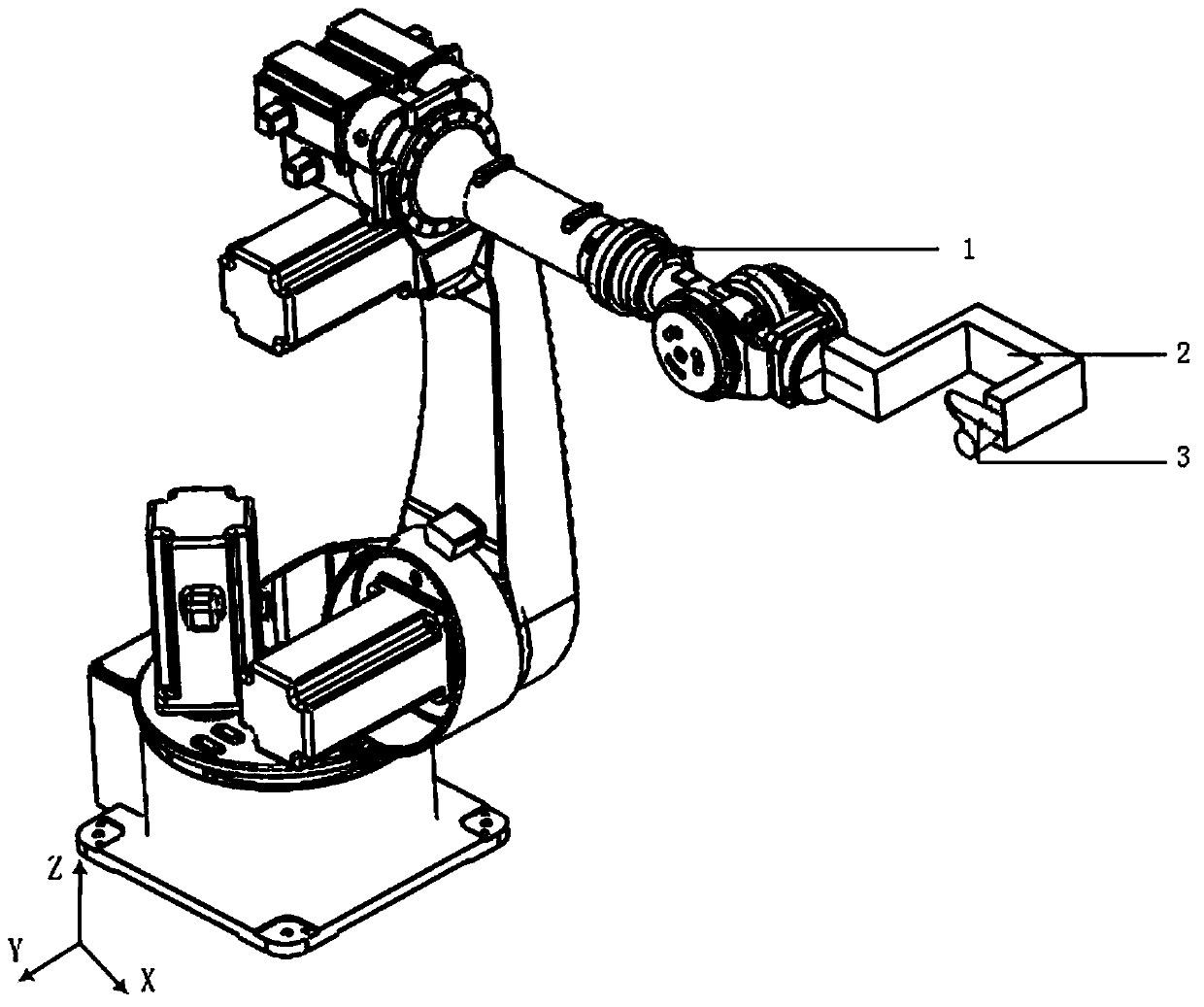
[0044] Example: In the present invention, a six-joint tandem robot blessed with faucet polishing is taken as an example to illustrate the steps of the method of the present invention:
[0045] 1. Import the assembly model of the faucet of the six-joint tandem robot into the 3D modeling software, make the robot base zero point at the origin of the assembly coordinate system, and make the X axis positive direction of the robot coordinate system point to the positive X axis direction of the assembly coordinate system , The positive direction of the Y axis of the robot coordinate system points to the positive direction of the Y axis of the assembly coordinate system, and the positive direction of the Z axis of the robot coordinate system points to the positive direction of the Z axis of the assembly coordinate system, so that the robot coordinate system and the assembly coordinate system are The origin and direction are exactly the same;
[0046] 2. In this example, use the robot's def...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More