

Offline programming based planning method for polishing track of workpiece clamped by robot
A technology of offline programming and trajectory planning, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., to reduce the difficulty of teaching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
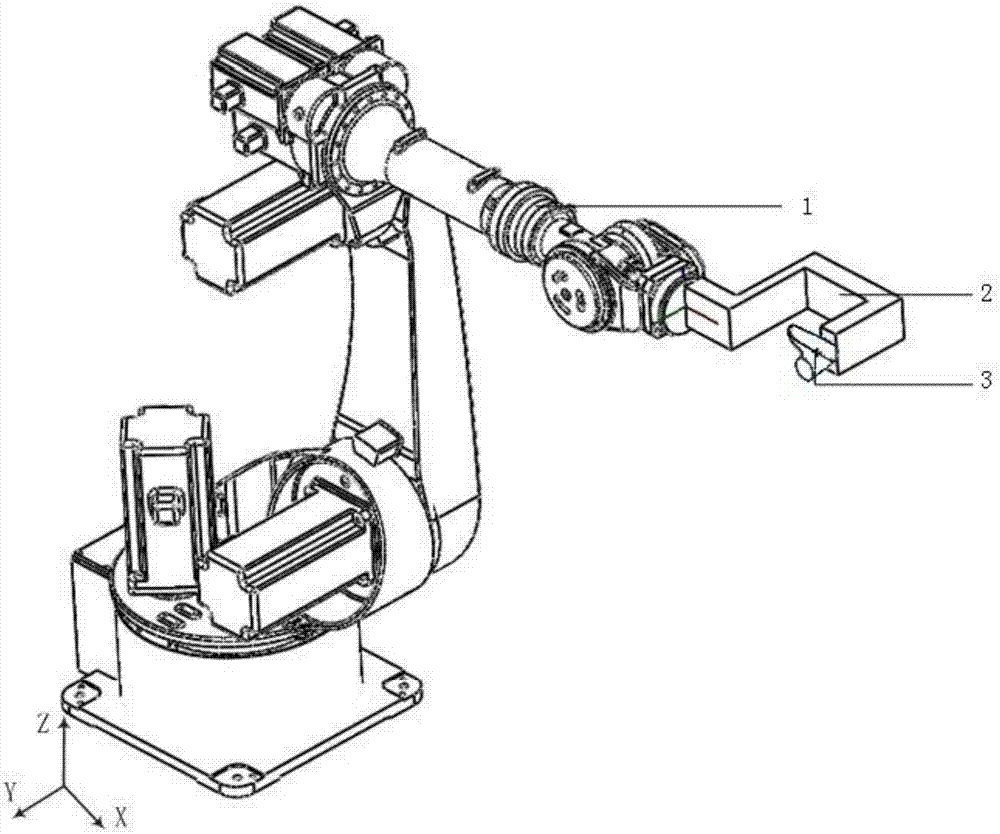
[0044] Embodiment: In the present invention, the implementation steps of the method of the present invention are described by taking the polishing of a faucet supported by a six-joint series robot as an example:
[0045] 1. Import the assembly model of the six-joint series robot holding the faucet into the 3D modeling software, make the zero point of the robot base be located at the origin of the assembly coordinate system, and make the positive direction of the X-axis of the robot coordinate system point to the positive direction of the X-axis of the assembly coordinate system , the positive direction of the Y-axis of the robot coordinate system points to the positive direction of the Y-axis of the assembly coordinate system, then the positive direction of the Z-axis of the robot coordinate system points to the positive direction of the Z-axis of the assembly coordinate system, so that the coordinates of the robot coordinate system and the assembly coordinate system The origin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More