

Intelligent underwater rescue method and system based on unmanned aerial vehicle
An unmanned aerial vehicle and intelligent technology, applied in the field of intelligent underwater rescue methods and systems, can solve problems such as harsh environmental conditions, difficulty in obtaining information, and high pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
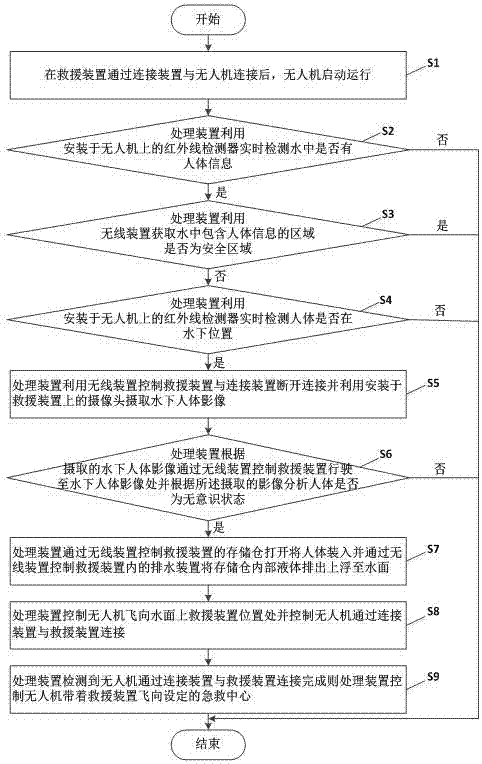
[0075] refer to figure 2 as shown, figure 2 A flow chart of an intelligent underwater rescue method based on a drone provided for one example of the present invention.
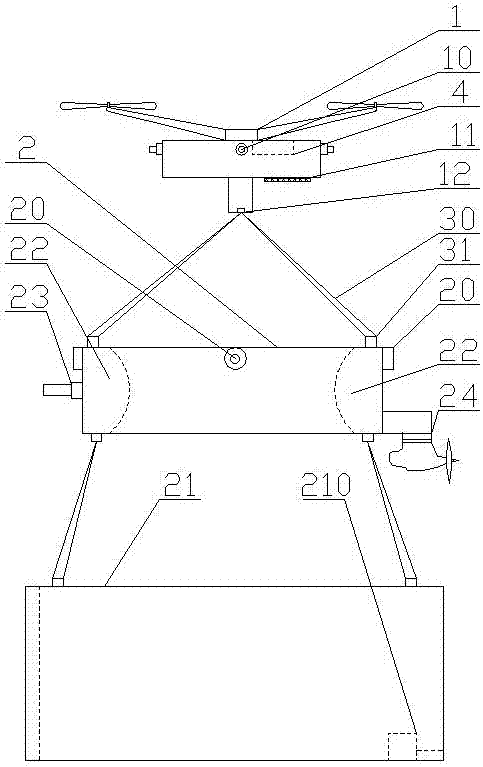
[0076] Specifically, the present embodiment provides an intelligent underwater rescue method based on a drone, including a drone 1, a rescue device 2, a connection device 3 and a processing device 4, and the method includes the following steps:
[0077] S1. After the rescue device 2 is connected to the UAV 1 through the connection device 3, the UAV 1 starts to operate;
[0078] S2. When the processing device 4 controls the UAV 1 to carry the rescue device 2 to fly at a preset speed according to a preset route, the processing device 4 uses the infrared detection device installed on the UAV 1 Device 10 detects whether there is human body information in the water in real time;
[0079] S3. If there is, the processing device 4 acquires whether the area containing human body information in the water is a safe ...
Embodiment 2
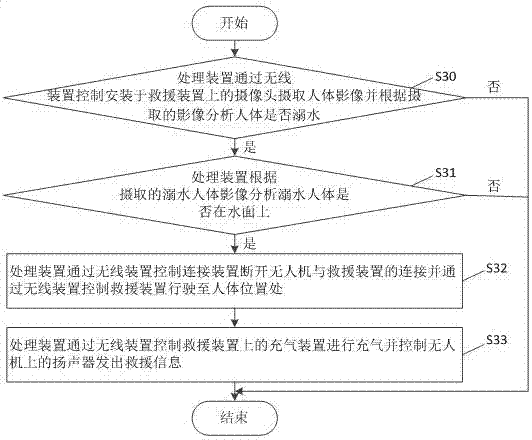
[0097] refer to image 3 as shown, image 3 A flowchart of a method for rescuing a drowning human body in a safe area is provided for one example of the present invention.
[0098]Specifically, this embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, after the processing device 4 uses the wireless device 44 to obtain that the area containing human body information in the water is a safe area, the The method also includes the steps of:
[0099] S30, the processing device 4 controls the camera 20 installed on the rescue device 2 to capture the image of the human body through the wireless device 44, and analyzes whether the human body is drowning according to the captured image;
[0100] S31. If yes, the processing device 4 analyzes whether the drowning body is on the water surface according to the ingested image of the drowning body;
[0101] S32. If so, the processing device 4 controls the connecting device 3 to disconnect the UAV 1 a...
Embodiment 3
[0105] refer to Figure 4 as shown, Figure 4 A flow chart of a rescue method using an inflatable device provided for one example of the present invention.
[0106] This embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, after the processing device 4 analyzes the human body in a conscious state according to the captured underwater human body images, the processing device 4 includes the following methods:
[0107] S60, the processing device 4 controls the rescue device 2 to descend below the human body through the wireless device 44 according to the captured underwater human body image and controls the inflatable device 22 on the rescue device 2 to inflate;
[0108] S61. The processing device 4 detects that the inflatable device 22 is inflated through the wireless device 44, then controls the rescue device 2 to bring the human body up to the water surface and controls the UAV 1 to communicate with the inflatable device 3 through the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More