

A sma-driven multi-section bionic tail device
A bionic tail and memory alloy wire technology, applied in the field of bionic robots, can solve the problems of space adjustment effectiveness, response speed and attitude control ability not comparable to animal tails, etc., and achieve soft movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
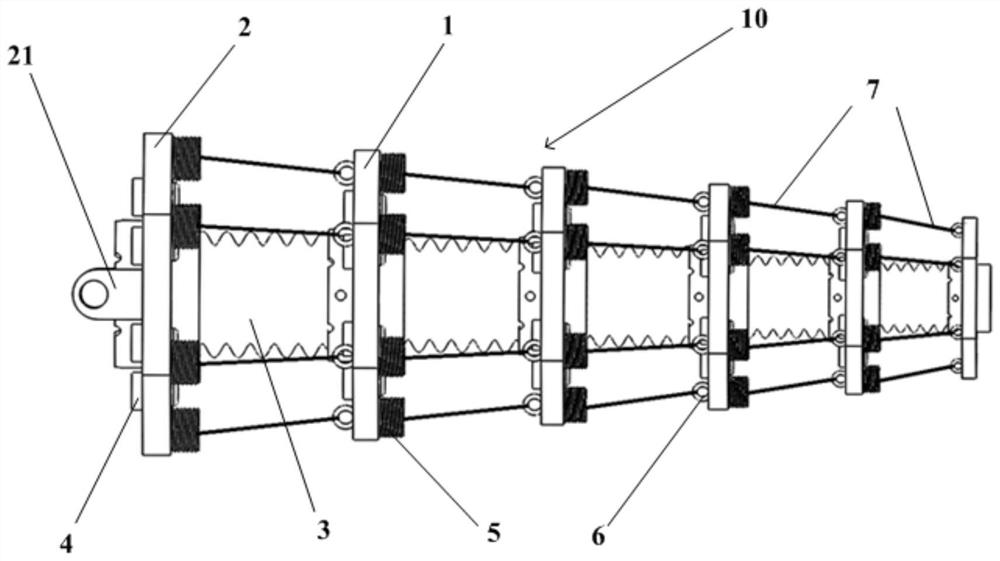
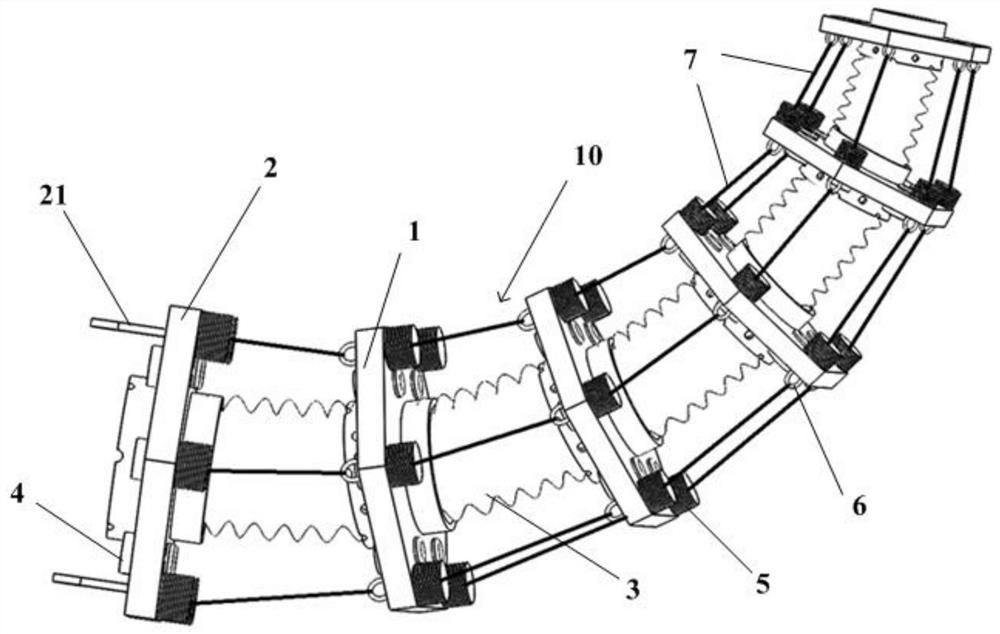
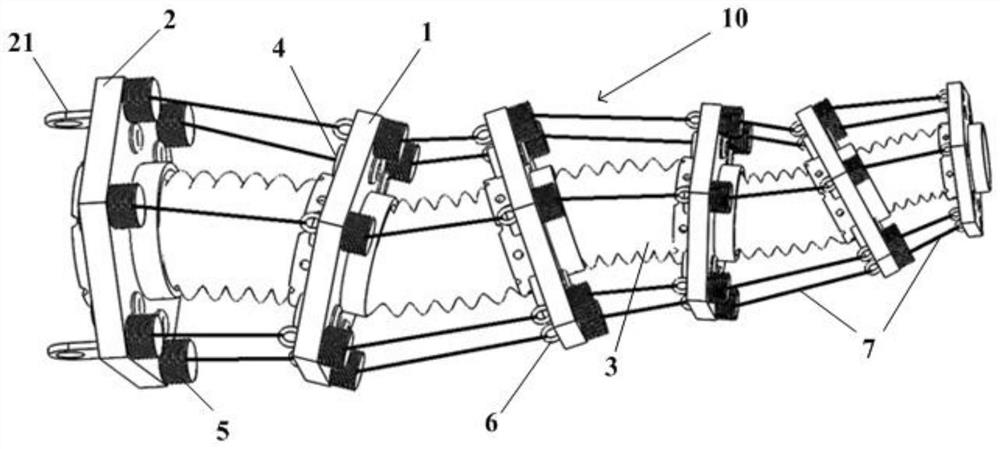
[0038] As shown in the figure, the present invention provides a multi-section bionic tail device driven by SMA, including: a first frame plate 1, an elastic connector 3 and a memory alloy wire 7; wherein:
[0039] A plurality of first rack plates 1 are arranged at intervals, and the first rack plates 1 are connected by the elastic connector 3 to form a bionic tail body 10; connected so that the main body 10 of the bionic tail forms a segmental structure; the elastic connector 3 can undergo elastic deformation.
[0040]The memory alloy wire 7 is distributed between the adjacent first rack disks 1, and the length of the memory alloy wire 7 is changed by switching on and off the memory alloy wire 7, thereby changing the relative positional relationship of the adjacent first rack disks 1; Memory alloy wire 7 (SMA) has the ability to recover from deformation, and can present different shapes according to different thermal load conditions. In this embodiment, the memory alloy wire ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More