

Three-joint bionic mechanical leg with autonomous hydraulic distribution power
A bionic mechanical leg and hydraulic power system technology, applied in the field of bionic robots, can solve the problems of inconvenient disassembly and maintenance, small joint torque, low charging efficiency, etc., and achieve the effect of convenient debugging and operation, large joint torque and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
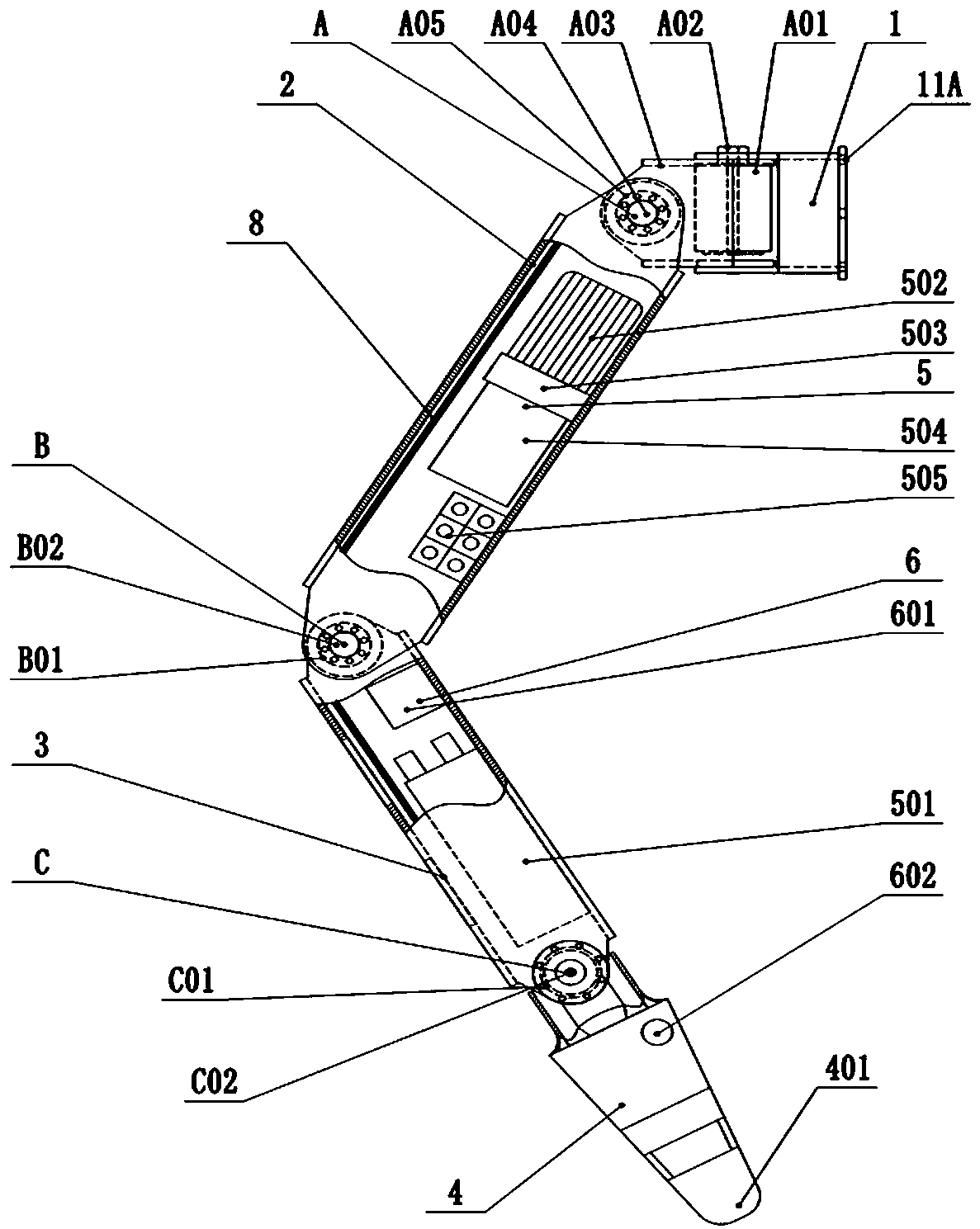
[0032] refer to figure 1 , figure 2 , the three-joint bionic mechanical leg with autonomous hydraulic distribution power in this embodiment has four degrees of freedom, mainly including connecting frame 1, three-dimensional joint A, thigh 2, two-dimensional joint B, lower leg 3, two-dimensional joint C, foot 4. Hydraulic power system 5, control device 6; the three-dimensional joint A is fixed on the connecting frame 1 and connected to the thigh 2, the thigh 2 is connected to the lower leg 3 through the two-dimensional joint B, and the lower leg 3 is connected to the foot 4 through the two-dimensional joint C , the hydraulic power system 5 is fixed in the cavity of the leg body of the thigh 2 and the calf 3, and is respectively connected with the hydraulic interfaces of the three-dimensional joint A, the two-dimensional joint B, and the two-dimensional joint C through hydraulic pipelines, and the control device 6 is fixed on the calf 3, the control device 6 is electrically co...
Embodiment 2
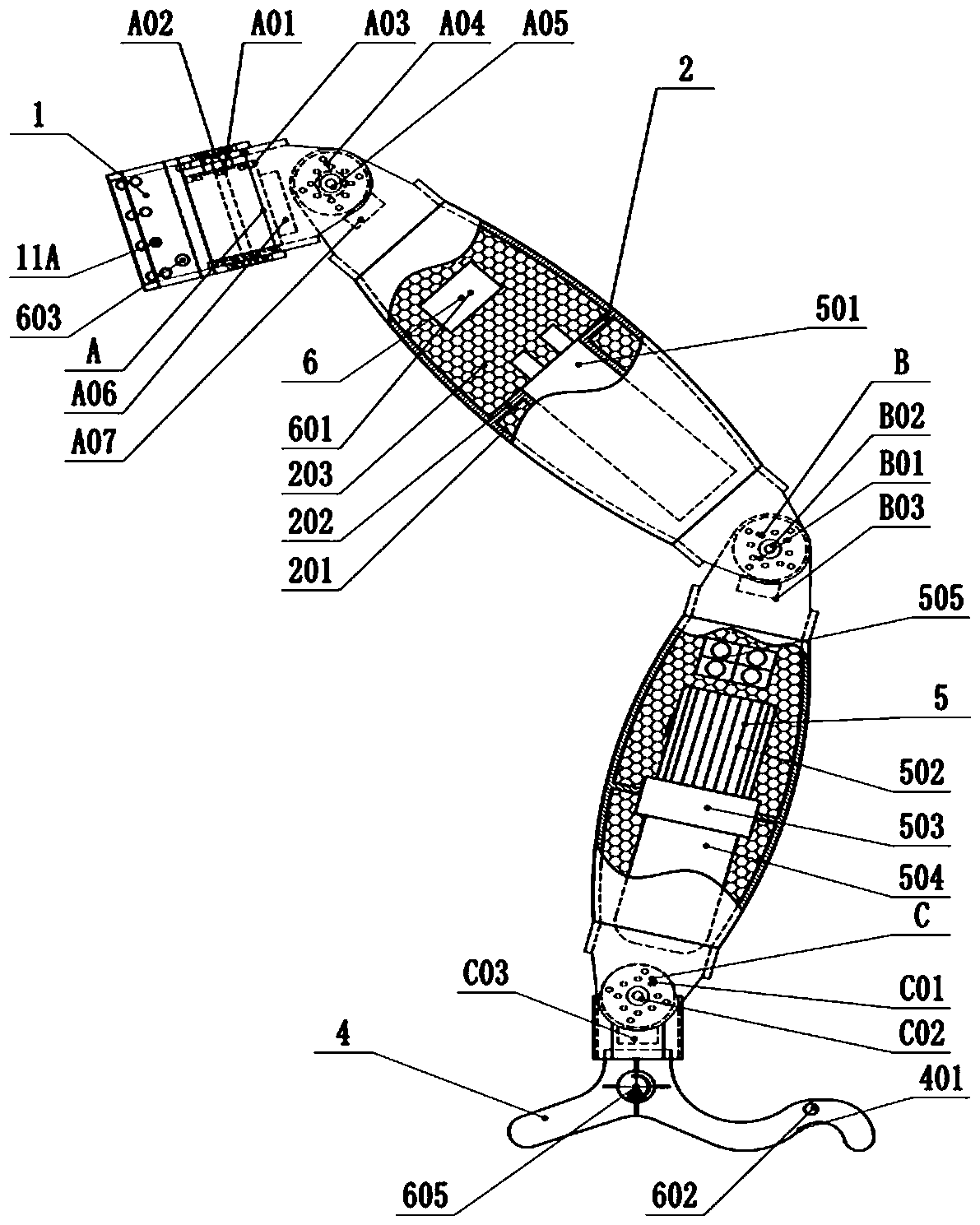
[0041] refer to image 3 , Figure 4 , the three-joint bionic mechanical leg with autonomous hydraulic distribution power in this embodiment has four degrees of freedom, mainly including connecting frame 1, three-dimensional joint A, thigh 2, two-dimensional joint B, lower leg 3, two-dimensional joint C, foot 4. Hydraulic power system 5, control device 6; the three-dimensional joint A is fixed on the connecting frame 1 and connected to the thigh 2, the thigh 2 is connected to the lower leg 3 through the two-dimensional joint B, and the lower leg 3 is connected to the foot 4 through the two-dimensional joint C , the hydraulic power system 5 is fixed in the femur cavities of the thigh 2 and the calf 3, and is respectively connected with the hydraulic interfaces of the three-dimensional joint A, the two-dimensional joint B, and the two-dimensional joint C through hydraulic pipelines, and the control device 6 is fixed on the connecting frame 1 In the cavities of the thigh 2 and t...
Embodiment 3
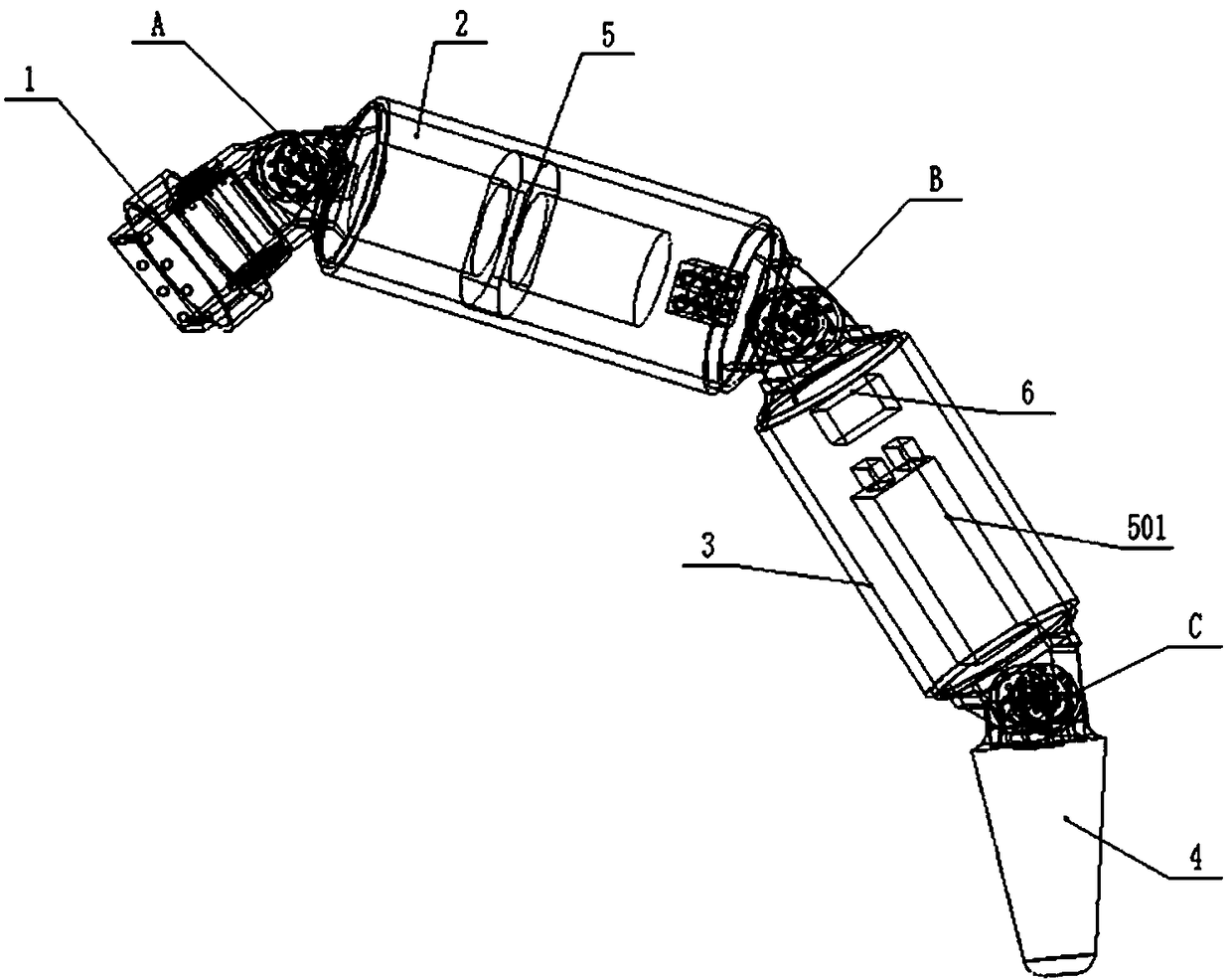
[0047] refer to Figure 5 , Figure 6 , the three-joint bionic mechanical leg with autonomous hydraulic distribution power in this embodiment has four degrees of freedom, mainly including connecting frame 1, three-dimensional joint A, thigh 2, two-dimensional joint B, lower leg 3, two-dimensional joint C, foot 4. Hydraulic power system 5, control device 6; the three-dimensional joint A is fixed on the connecting frame 1 and connected to the thigh 2, the thigh 2 is connected to the lower leg 3 through the two-dimensional joint B, and the lower leg 3 is connected to the foot 4 through the two-dimensional joint C , the hydraulic power system 5 is fixed in the femur cavities of the thigh 2 and the calf 3, and is respectively connected with the hydraulic interfaces of the three-dimensional joint A, the two-dimensional joint B, and the two-dimensional joint C through hydraulic pipelines, and the control device 6 is fixed on the connecting frame 1 In the cavities of the lower leg 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More