

Hybrid-driven industrial robot balance cylinder system and method
An industrial robot and hybrid drive technology, applied in manipulators, manufacturing tools, etc., can solve problems such as difficulty in achieving complete balance and low adjustment accuracy, and achieve the effects of compact structure, improved safety and reliability, and precise motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
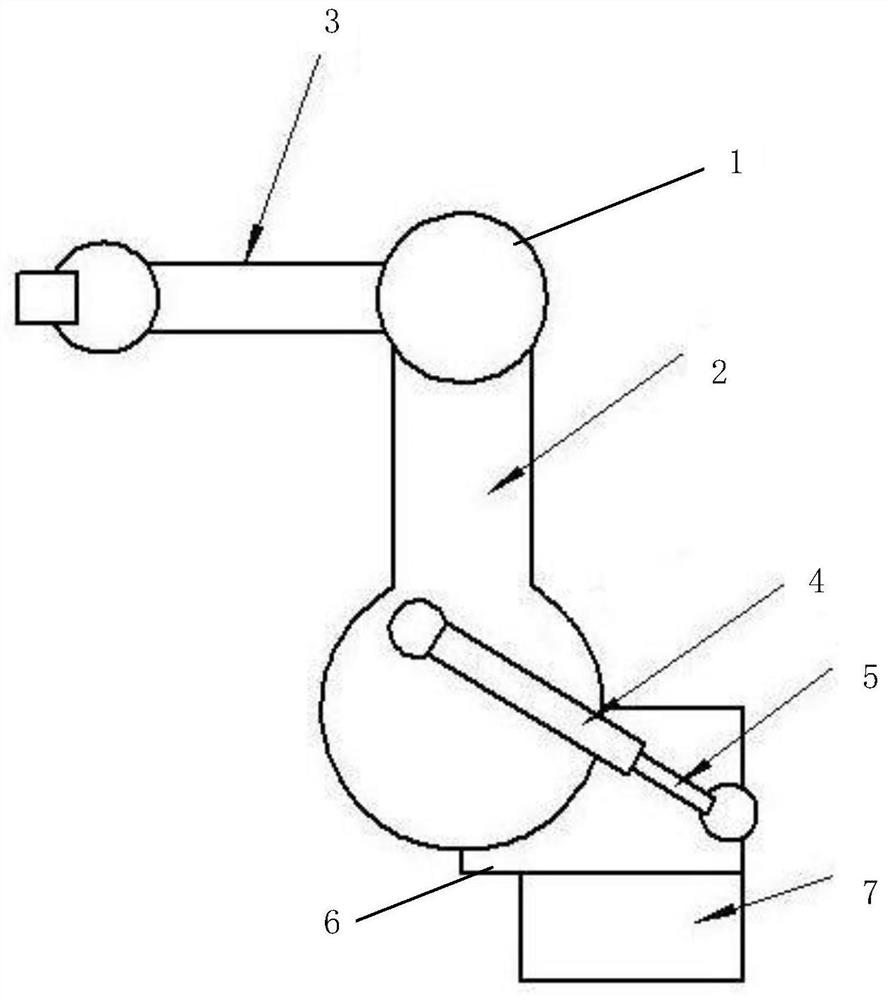
[0037] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings. Embodiment: a kind of hybrid drive industrial robot balance cylinder system of the present embodiment, such as figure 1 As shown, it includes a robot body 1 and a balance cylinder execution device and a control device installed on the robot body 1 . The robot body 1 is used to realize the work of picking and placing, carrying objects or manipulating tools. The balance cylinder actuator is used to balance the torque generated by gravity on the two axes of the robot, and reduce the change of joint drive torque caused by gravity. The control device is used to calculate the load on the balance cylinder actuator and assist in fine-tuning.
[0038] The robot body 1 includes a lower mechanical arm 2, one end of the lower mechanical arm 2 is rotatably mounted on a waist seat 6, and the other end of the lower m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More