

A wheel-legged humanoid robot with internal gas flow
A humanoid, robot technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as flexibility affecting robot movement, long hose routing, complexity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
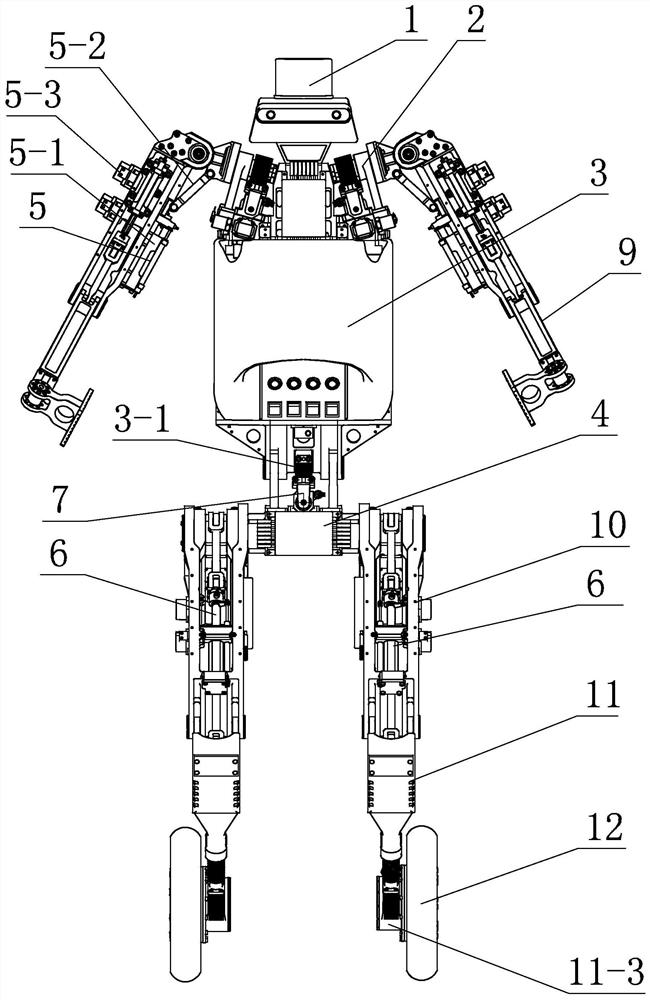
[0050] Specific implementation mode one: combine Figure 1-Figure 6 To illustrate this embodiment, this embodiment includes a head 1, a shoulder 2, a body 3, a hip pelvis 4, a first hydraulic linkage assembly 5, a second hydraulic linkage assembly 6, and a third hydraulic linkage assembly 13. Hydraulic cylinder 7, two mechanical arms 9, two thighs 10, two shanks 11 and two drive wheels 12; each mechanical arm 9 includes a large arm 9-1, a small arm 9-2, a third hydraulic cylinder 9-3, the third connecting rod 9-4 and the third hydraulic servo valve 9-5; the shoulder 2 is provided with two rotating shafts 2-1 and two swing arm hydraulic cylinders 2-2,
[0051] The head 1, the shoulder 2 and the body 3 are fixed together from top to bottom in sequence, the body 3 is hinged with the hip and pelvis 4 and driven by the hydraulic cylinder 7, and each mechanical arm 9 is hinged on the shoulder 2 and passed through the first The hydraulic link assembly 5 can be driven to swing left a...
specific Embodiment approach 2
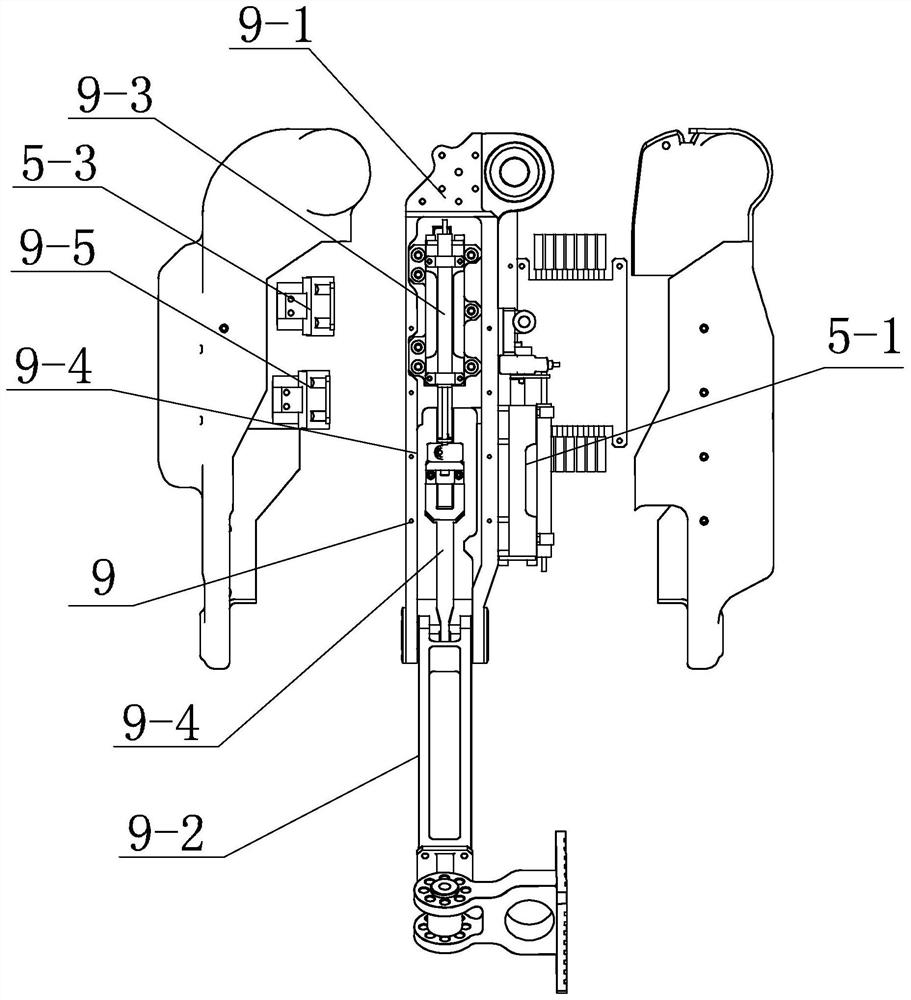
[0069] Specific implementation mode two: combination figure 1 with image 3 To illustrate this embodiment, the first hydraulic linkage assembly 5 of this embodiment includes a first hydraulic cylinder 5-1, a first connecting rod 5-2, and a first hydraulic servo valve 5-3;
[0070] Each mechanical arm 9 is provided with a first hydraulic cylinder 5-1, one end of the first connecting rod 5-2 is hinged to the rotating shaft 2-1, and the other end of the first connecting rod 5-2 is connected to the first hydraulic cylinder 5. -1 is hinged at the execution end, and the first hydraulic cylinder 5-1 on each mechanical arm 9 drives the first connecting rod 5-2 so that each mechanical arm 9 can swing left and right;
[0071] The oil inlet of the first hydraulic cylinder 5-1 communicates with the oil outlet of the first hydraulic servo valve 5-3 through a hydraulic pipe, and the oil inlet of the first hydraulic servo valve 5-3 communicates with the third oil outlet through a hydraulic pi...
specific Embodiment approach 3
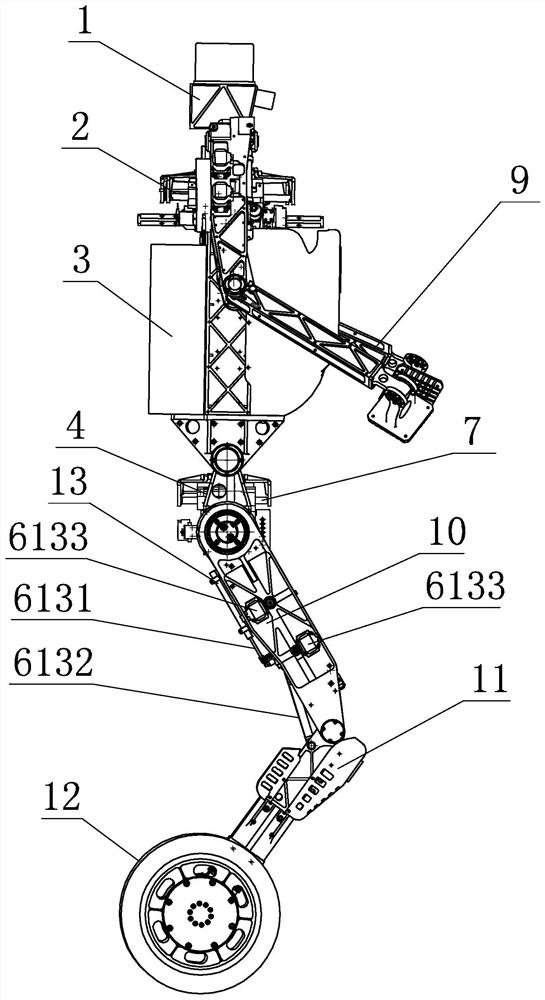
[0073] Specific implementation mode three: combination figure 2 To illustrate this embodiment, the second hydraulic linkage assembly 6 and the third hydraulic linkage assembly 13 of this embodiment respectively include a second hydraulic cylinder 6131, a second connecting rod 6132, and a second hydraulic servo valve 6133;
[0074] Each thigh 10 is provided with a set of second hydraulic linkage assembly 6 and a set of third hydraulic linkage assembly 13, wherein the second hydraulic cylinder 6131 and the second hydraulic servo valve 6133 on the second hydraulic linkage assembly 6 and The second hydraulic cylinder 6131 and the second hydraulic servo valve 6133 on the third hydraulic linkage assembly 13 are fixed on each thigh 10,
[0075] One end of the second connecting rod 6132 on the second hydraulic connecting rod assembly 6 is hinged with the hip pelvis 4, and the other end of the second connecting rod 6132 on the second hydraulic connecting rod assembly 6 is connected to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More