

Drone obstacle avoidance method
A UAV and obstacle avoidance technology, which is applied in the direction of three-dimensional position/channel control, etc., can solve the general safety problems of UAV obstacle avoidance, and achieve the effect of satisfying maneuverability constraints, easy implementation, and simple method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
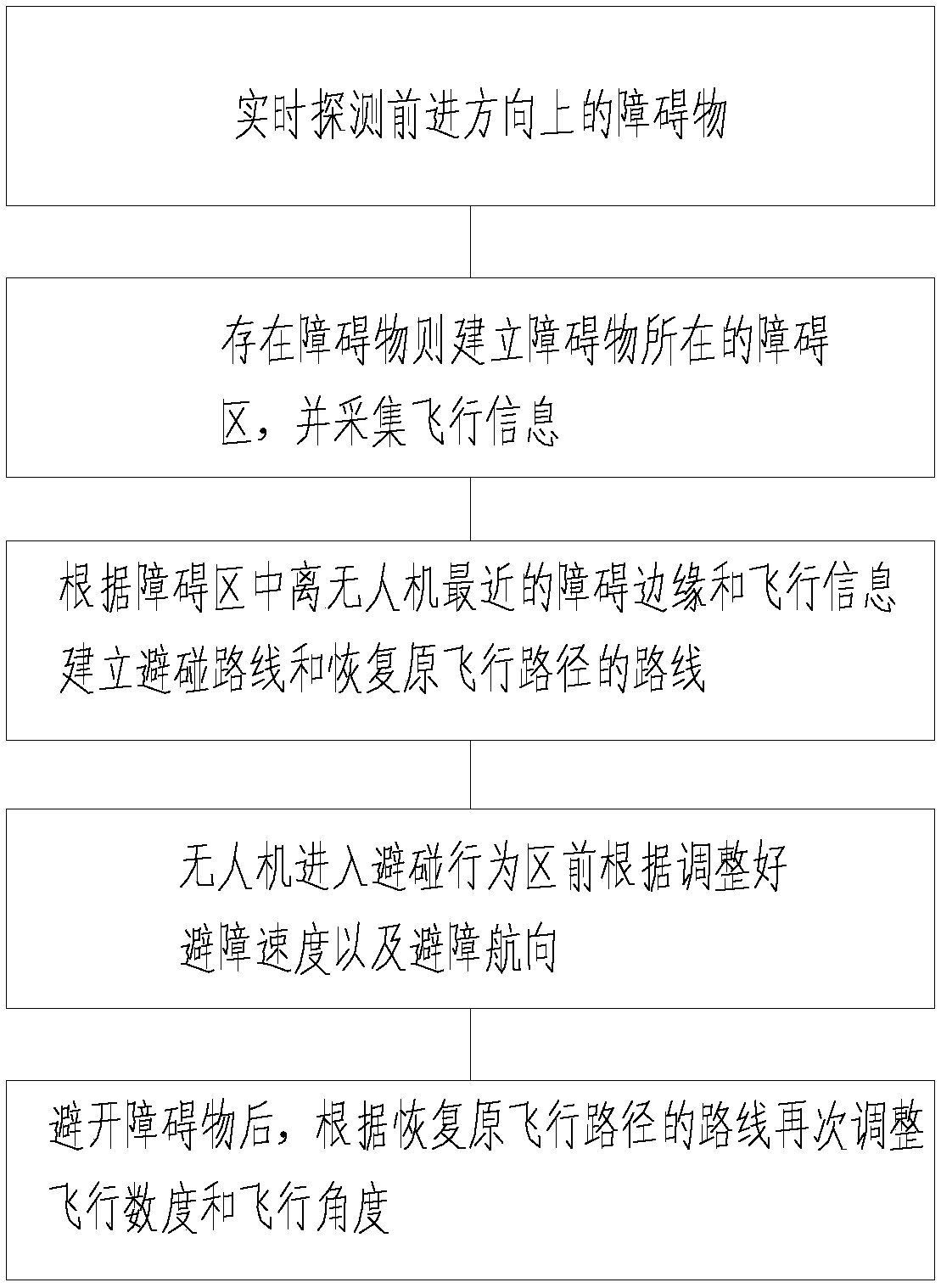
[0028] Such as Figure 1-2 Shown, a UAV obstacle avoidance method, comprises the following steps:
[0029] 1) Real-time detection of obstacles in the forward direction;
[0030] 2) If there is an obstacle, establish the obstacle area where the obstacle is located, and collect flight information;
[0031] 3) Establish a collision avoidance route and a route to restore the original flight path according to the obstacle edge and flight information closest to the UAV in the obstacle area;
[0032] 4) Before the UAV enters the collision avoidance zone, adjust the obstacle avoidance speed and obstacle avoidance course;
[0033] 5) After avoiding obstacles, adjust the flight speed and flight angle again according to the route to restore the original flight path.
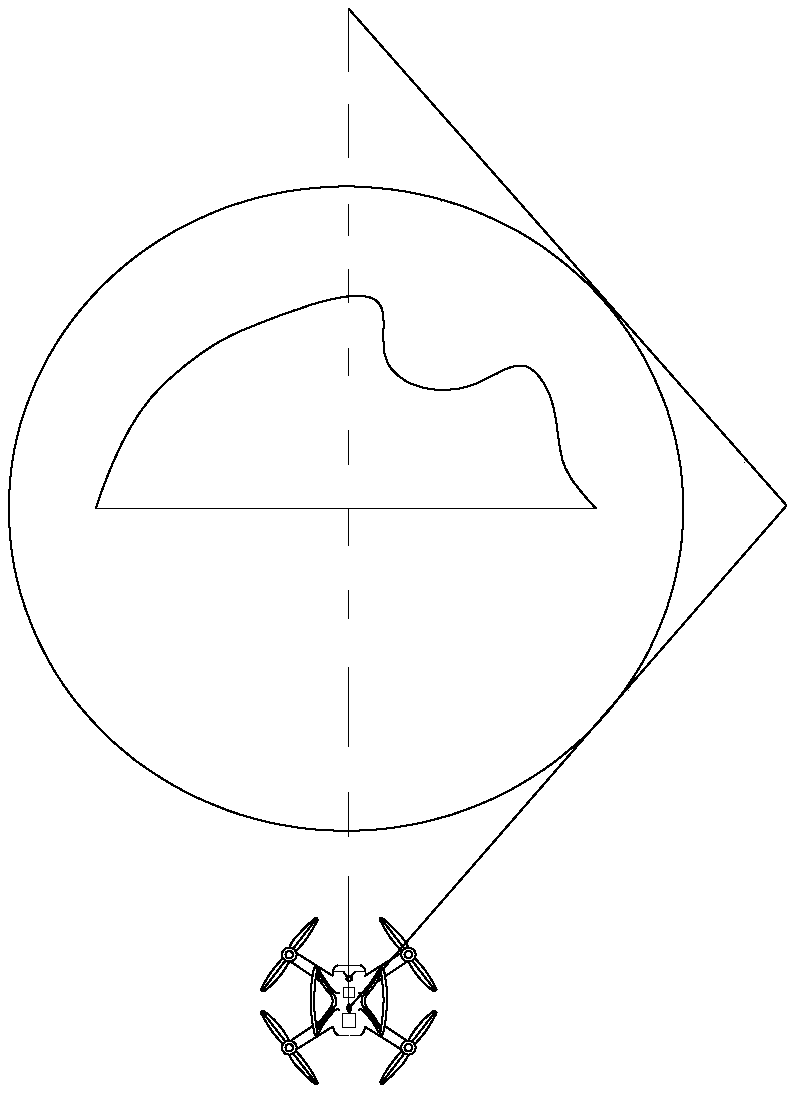
[0034] In this embodiment, the method for establishing the obstacle zone includes the following steps:
[0035] Ⅰ) Get the maximum width of the obstacle;
[0036] Ⅱ) Establish a spherical area based on the maximum widt...
Embodiment 2
[0044] Such as Figure 1-2 Shown, a UAV obstacle avoidance method, comprises the following steps:
[0045] 1) Real-time detection of obstacles in the forward direction;
[0046] 2) If there is an obstacle, establish the obstacle area where the obstacle is located, and collect flight information;
[0047] 3) Establish a collision avoidance route and a route to restore the original flight path according to the obstacle edge and flight information closest to the UAV in the obstacle area;
[0048] 4) Before the UAV enters the collision avoidance zone, adjust the obstacle avoidance speed and obstacle avoidance course;
[0049] 5) After avoiding obstacles, adjust the flight speed and flight angle again according to the route to restore the original flight path.
[0050] In this embodiment, the method for establishing the obstacle zone includes the following steps:
[0051] Ⅰ) Get the maximum width of the obstacle;
[0052] Ⅱ) Establish a spherical area based on the maximum widt...
Embodiment 3
[0060] Such as Figure 1-2 Shown, a UAV obstacle avoidance method, comprises the following steps:
[0061] 1) Real-time detection of obstacles in the forward direction;
[0062] 2) If there is an obstacle, establish the obstacle area where the obstacle is located, and collect flight information;
[0063] 3) Establish a collision avoidance route and a route to restore the original flight path according to the obstacle edge and flight information closest to the UAV in the obstacle area;
[0064] 4) Before the UAV enters the collision avoidance zone, adjust the obstacle avoidance speed and obstacle avoidance course;
[0065] 5) After avoiding obstacles, adjust the flight speed and flight angle again according to the route to restore the original flight path.
[0066] In this embodiment, the method for establishing the obstacle zone includes the following steps:
[0067] Ⅰ) Get the maximum width of the obstacle;
[0068] Ⅱ) Establish a spherical area based on the maximum widt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More