

Method and device for avoiding obstacle of unmanned aerial vehicle
A technology for unmanned aerial vehicles and obstacle avoidance, applied in the field of aviation science, can solve problems such as unmanned aerial vehicle maneuverability constraints, airborne or ground station processor performance requirements are high, real-time requirements are not met, etc., to achieve Reduce flight energy consumption costs, meet UAV maneuverability constraints, and quickly and safely avoid obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be described below in conjunction with the accompanying drawings and specific examples.
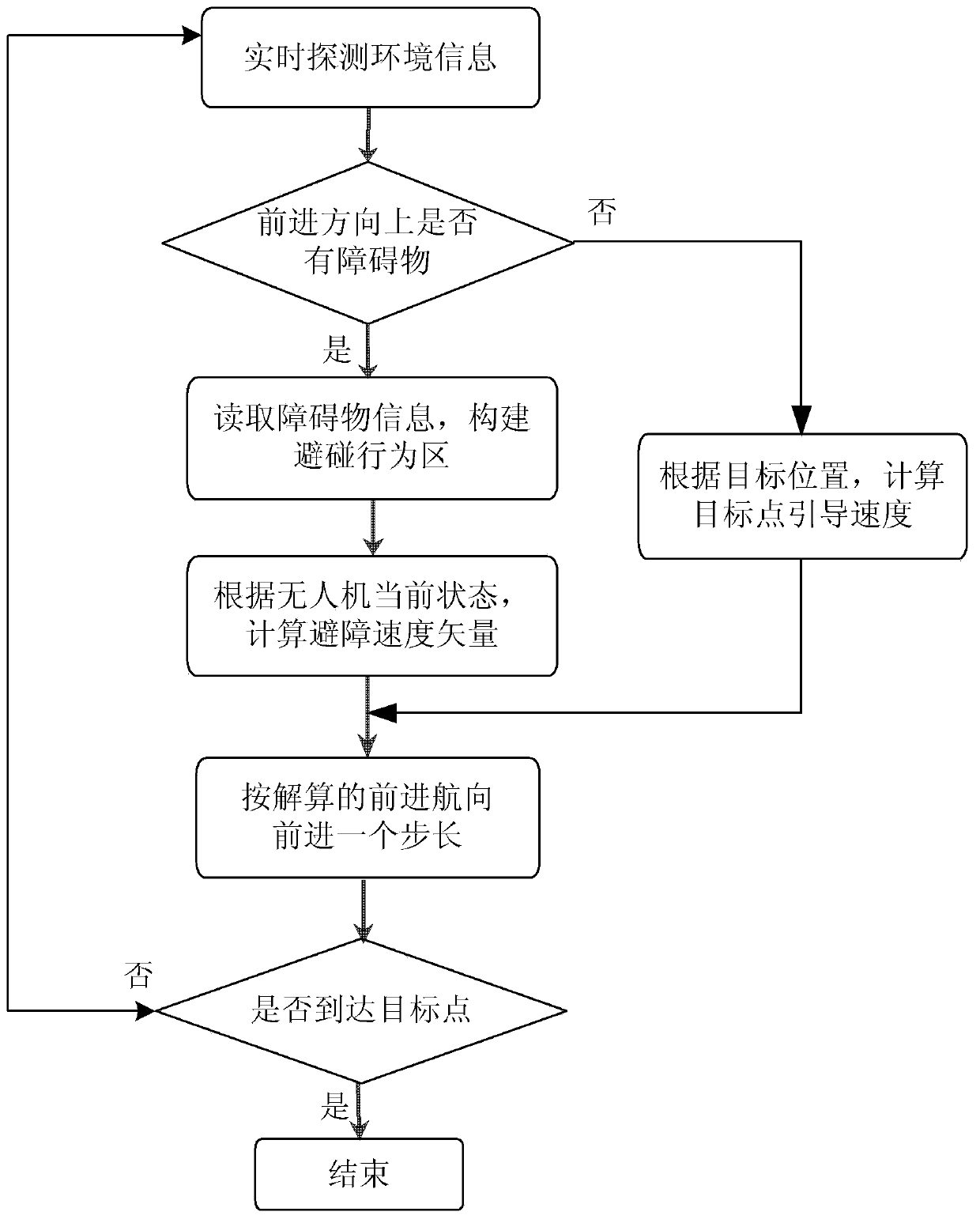
[0029] figure 1 A flow chart of an obstacle avoidance method for an unmanned aerial vehicle based on human obstacle avoidance behavior disclosed in the present invention is shown. Such as figure 1 As shown, the method specifically includes the following steps:
[0030] Step 1. The sensor detects and judges whether there are obstacles and sudden threats in the direction of the UAV in real time; if there are, go to step 2; if there are no obstacles and threats, go to step 5;
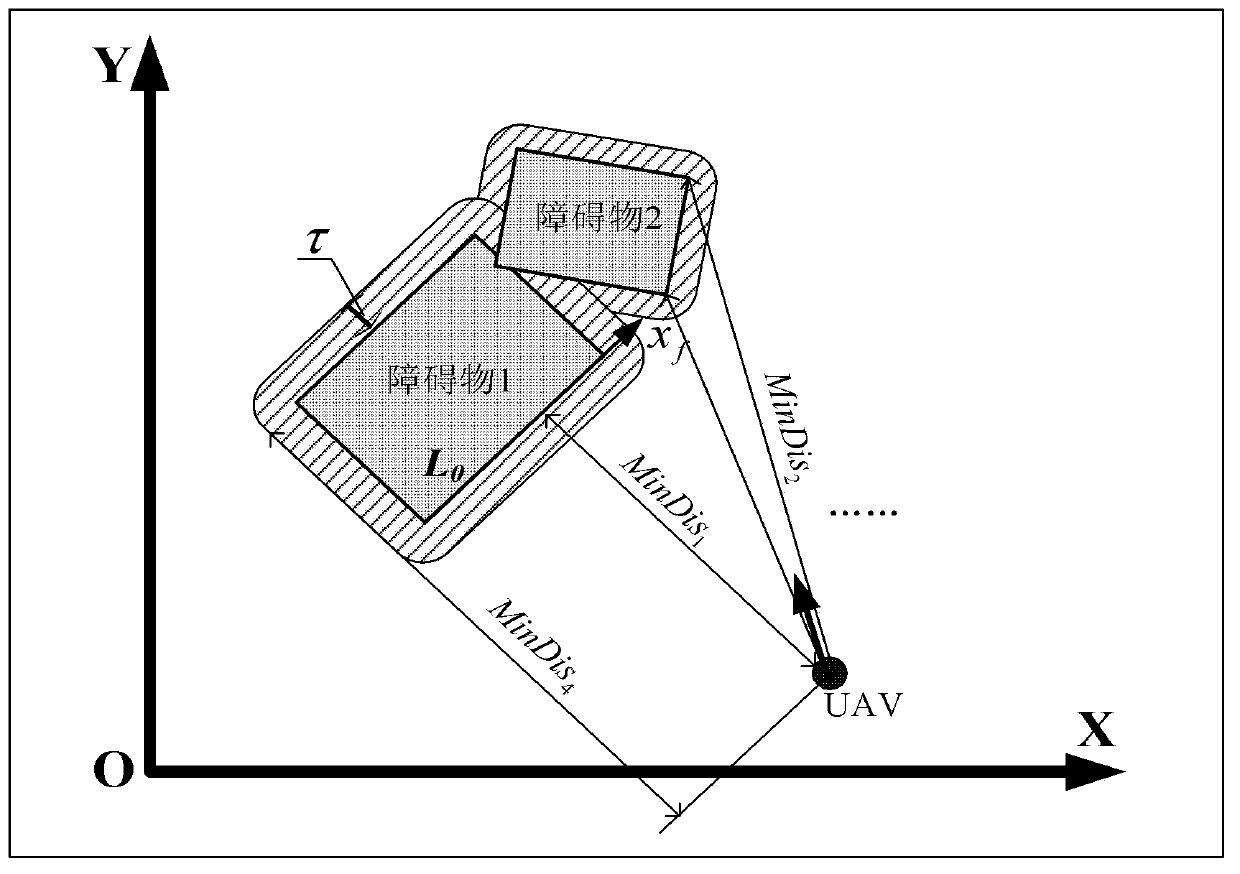
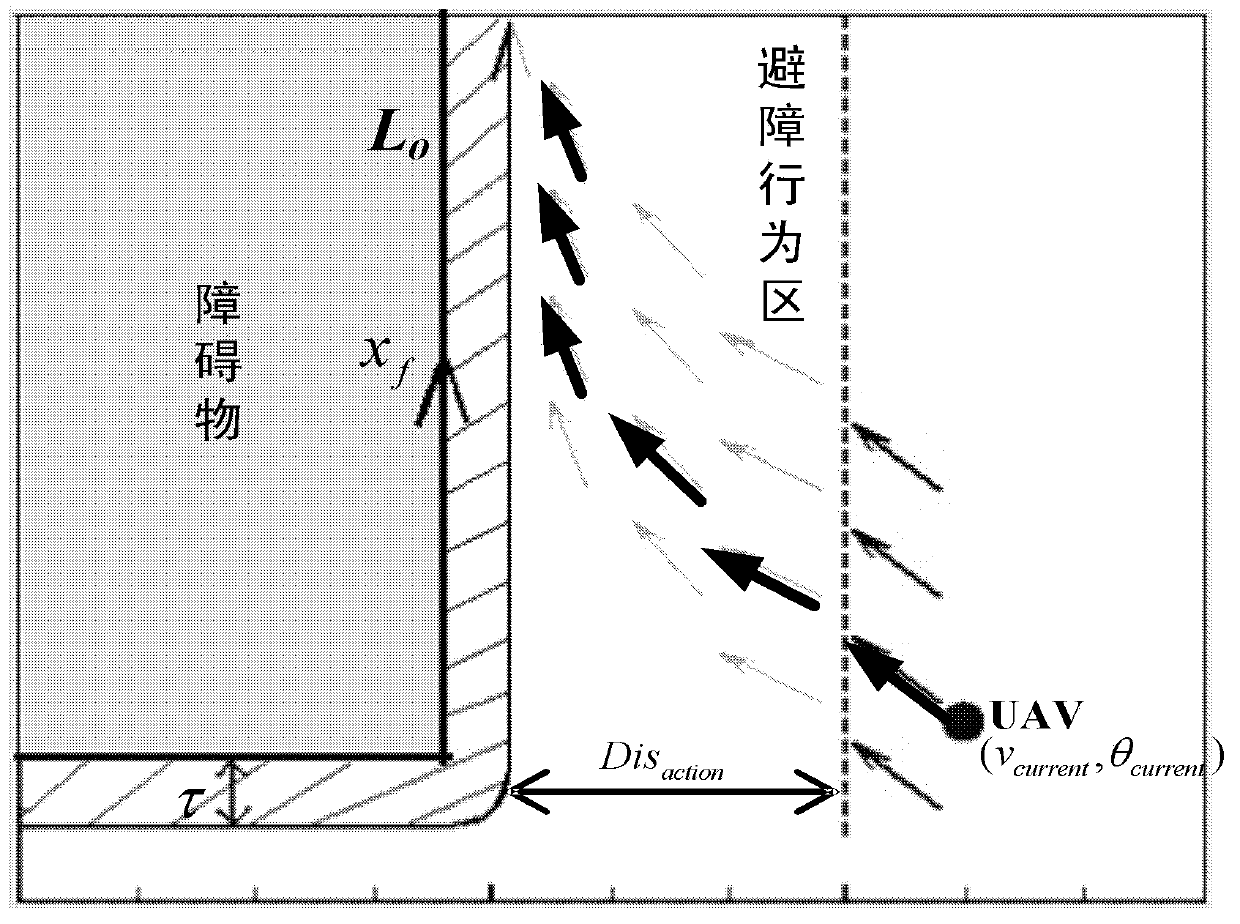
[0031] Step 2. If there is an obstacle or a sudden threat, model the obstacle area where the obstacle or sudden threat is located, judge the nearest obstacle edge in the obstacle area model, and use the nearest edge to construct a collision avoidance behavior area Γ, when there is no When the man-machine flies within the range of the collision avoidance b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More