

Surgical assistant locating system
An auxiliary positioning system and surgery technology, applied in the field of surgical auxiliary systems, can solve the problems of limited activity space for operating surgical robots and prolonging operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with specific embodiment and accompanying drawing, set forth more details in the following description so as to fully understand the present invention, but the present invention can obviously be implemented in many other ways different from this description, Those skilled in the art can make similar promotions and deductions based on actual application situations without violating the connotation of the present invention, so the content of this specific embodiment should not limit the protection scope of the present invention.
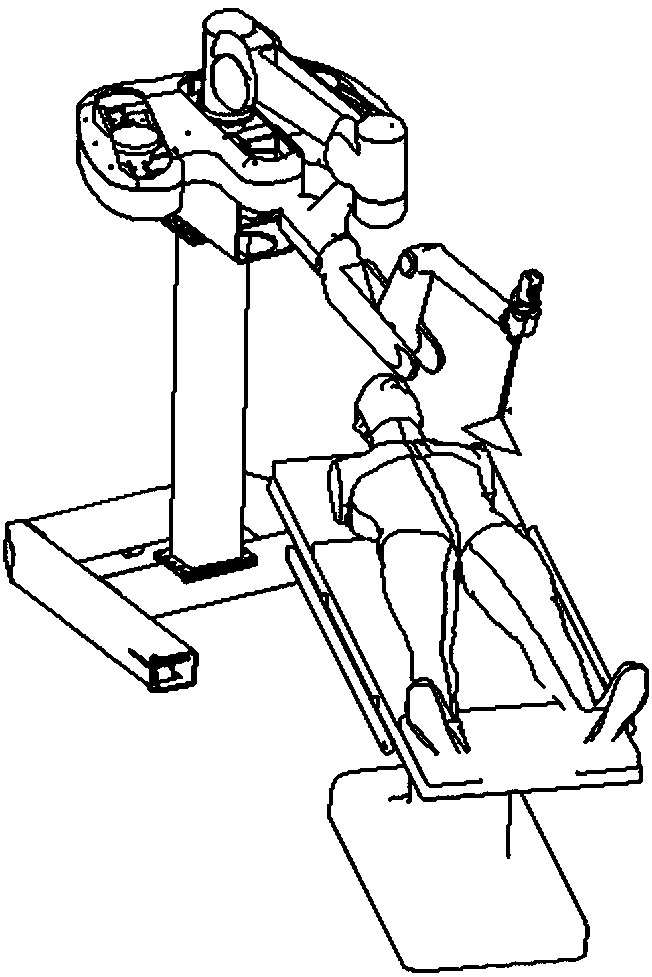
[0046] In an embodiment of the present invention, the minimally invasive robot surgery system includes a robot patient end and a robot doctor end. figure 1 Shown is an image trolley 1, a side trolley 2, a doctor console 3, a surgical trolley 4, and a tool trolley 9, wherein the side trolley 2 is the patient end of the surgical robot, and the doctor console 3 is the doctor end of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More