

An Approximate Dynamic Programming Optimization Control Method for Attitude Adjustment of Underwater Thermal Glider
A technology of dynamic programming and optimal control, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as optimal control of attitude adjustment of underwater thermal glider, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
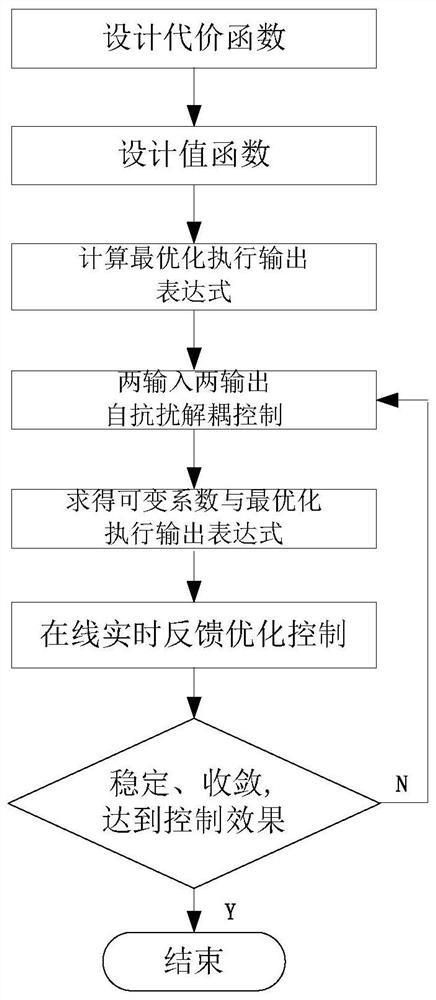
[0048] Such as figure 1 As shown, an approximate dynamic programming optimization control method for underwater thermal glider attitude adjustment, including the following steps:
[0049] S1, designing the cost function of the approximate dynamic programming controller, the output end of the approximate dynamic programming controller is connected to the controlled object of the underwater thermal glider;
[0050] S2, designing the value function of the approximate dynamic programming controller;
[0051] S3, calculating the optimal execution output equation of the approximate dynamic programming controller;
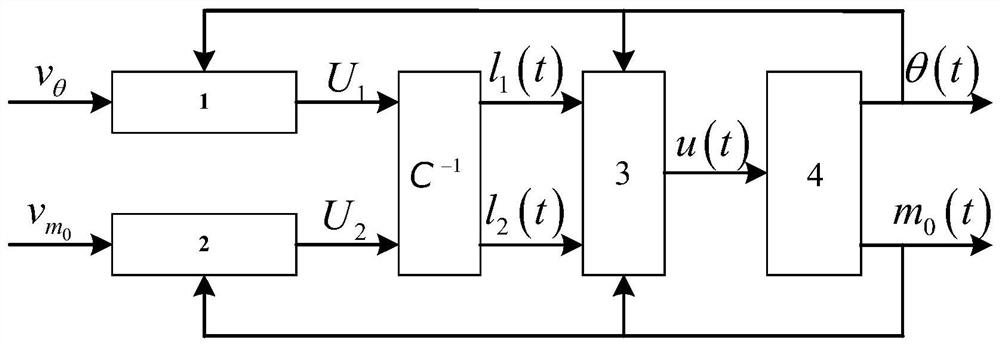
[0052] S4, connecting two single-input single-output active disturbance rejection controllers in parallel before the approximate dynamic programming controller, and controlling and outputting two control sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More