

Design method of ship heading trajectory tracking based on adaptive fuzzy optimal control
An adaptive fuzzy and trajectory tracking technology, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of high cost and difficult engineering implementation, slow tracking speed, and energy consumption of the controller.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
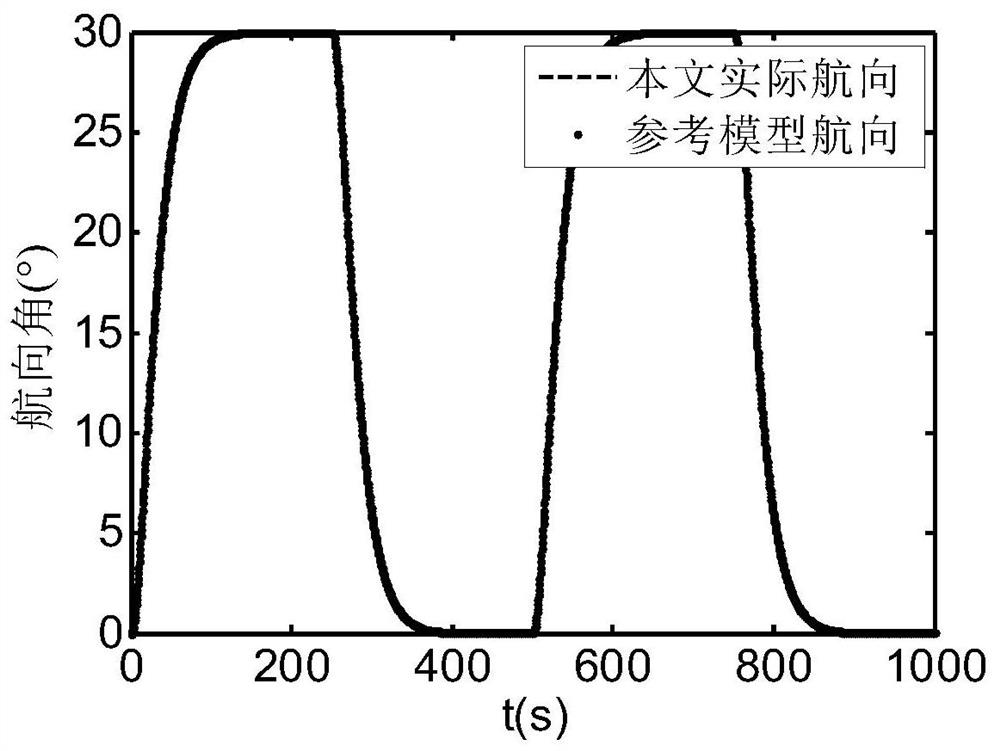
[0097] Based on the above method, taking the actual ship as an example, computer simulation is carried out. Known: A ship heading discrete nonlinear system mathematical model parameter a 1 = 1,a 2 =30, K=0.2, T=64, designed parameters γ=0.05, γ c = 0.01, β = 0.05. Verify the effectiveness of the control algorithm in this paper. The tracking signal selects a mathematical model that can represent the actual performance requirements:
[0098] φ m (k+2)+0.1φ m (k+1)+0.0025φ m (k) = 0.0025φ r (k) (13)
[0099] In the formula, Ideal system performance for ship heading, is a processed input signal, its value is 0°~30°, and its period is 500s.
[0100] The simulation results of this example are as follows image 3 shown. It can be seen from the figure that the self-adaptive fuzzy optimal algorithm designed by this method, the control system can quickly obtain the expected system output, and has good tracking performance.
[0101] The serial numbers of the above embodim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More