

Unmanned aerial vehicle stable flight control method
An unmanned aerial vehicle, flight control technology, applied in the field of flight control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
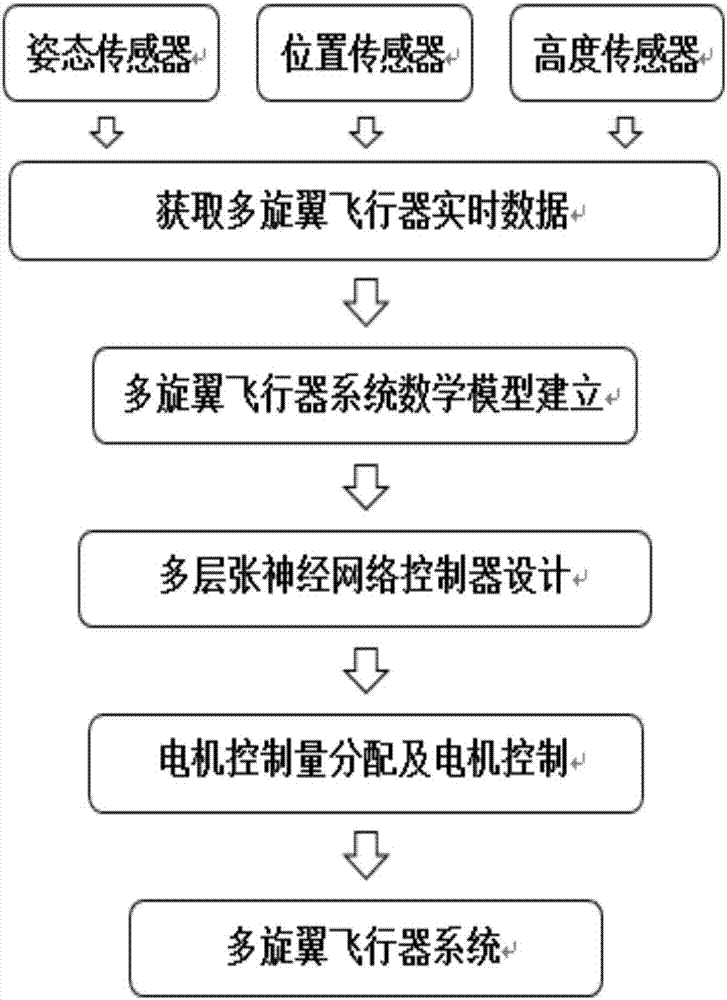
[0209] Such as figure 1 As shown, the present embodiment provides a method for controlling the stable flight of an unmanned aerial vehicle, which includes the following steps:
[0210] S1: Obtain the real-time flight data of the aircraft itself through the attitude sensor, position sensor, and height sensor on the unmanned aerial vehicle, and analyze and process the kinematics of the aircraft through the on-board processor to establish an aircraft dynamics model ;
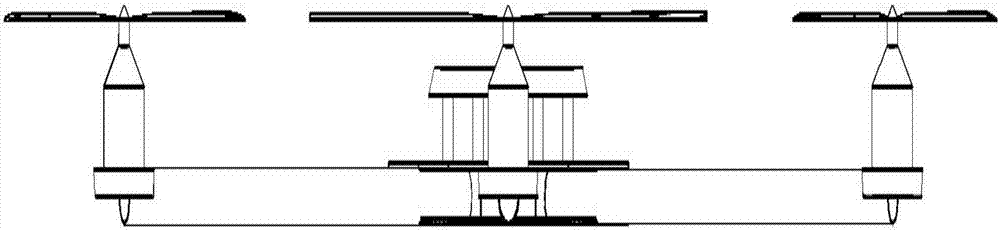
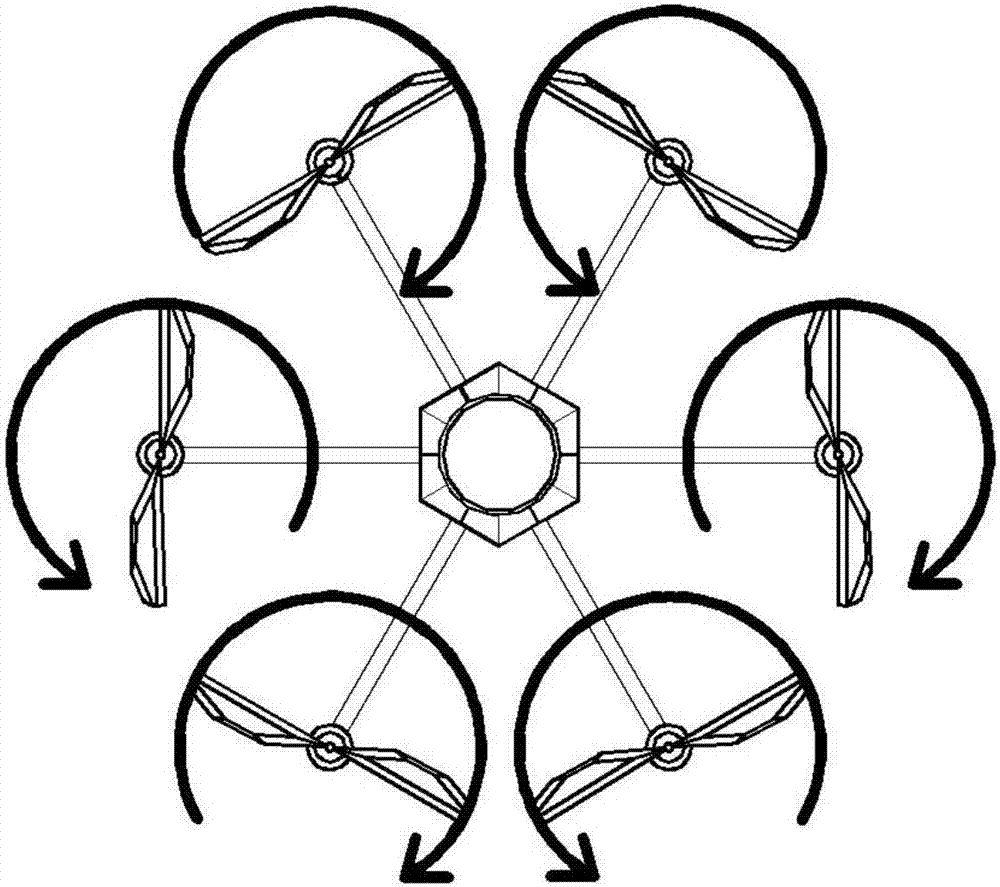
[0211] A rotor flight structure in a multi-rotor aircraft such as figure 2 , image 3 as well as Figure 4 shown. The structure is a six-rotor aircraft mechanism model, which is composed of a multi-rotor aircraft propeller, a brushless motor, a rotor arm and a fuselage. image 3 with Figure 4 The direction of the arrow in the figure indicates the rotation direction of the motor, and the combination of clockwise and counterclockwise rotation directions in the figure is to realize the mutual cancellation of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More