

Vascular intervention surgery robot slave manipulator for catheter-guiding wire manipulation
A technology of interventional surgery and robotics, applied in the field of medical devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
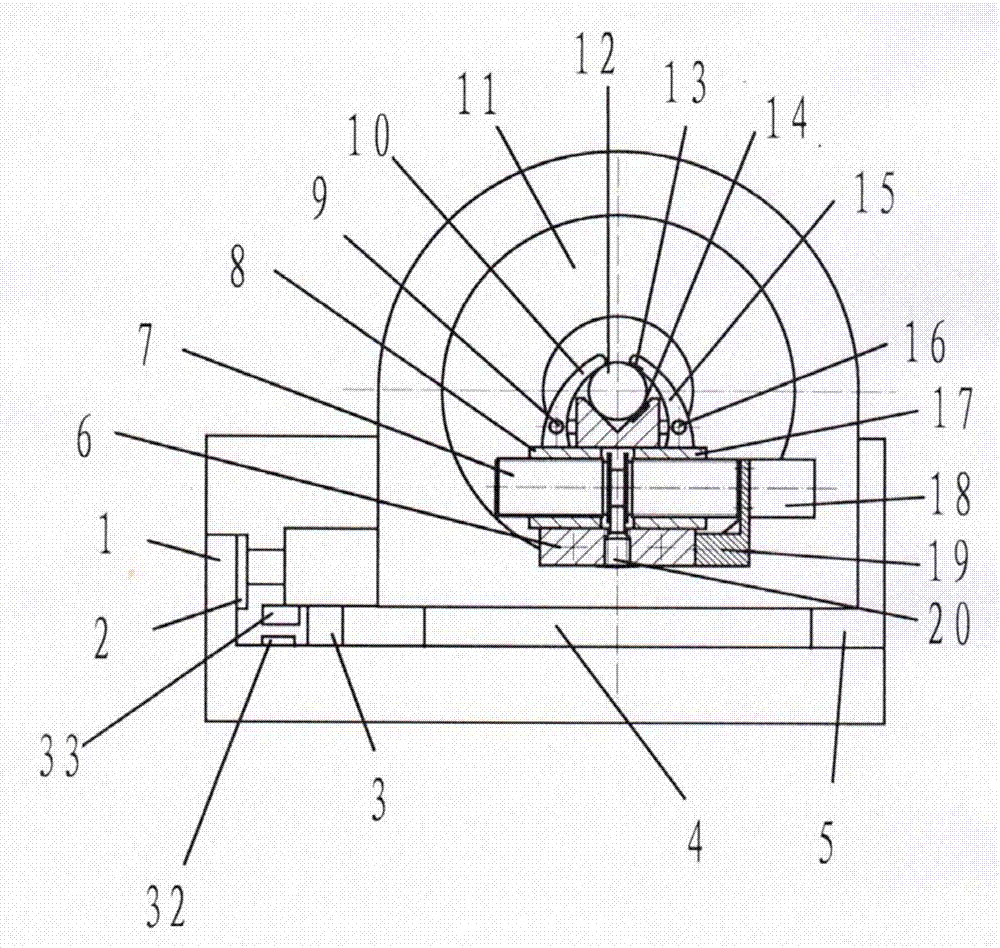
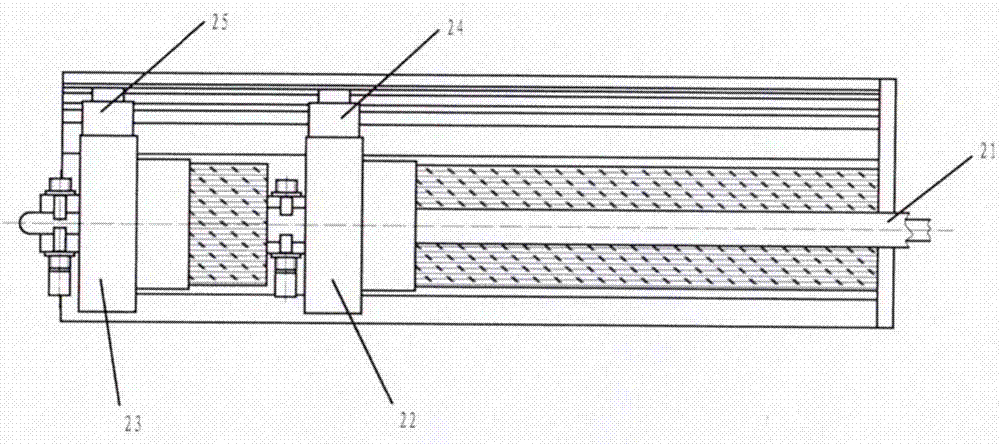
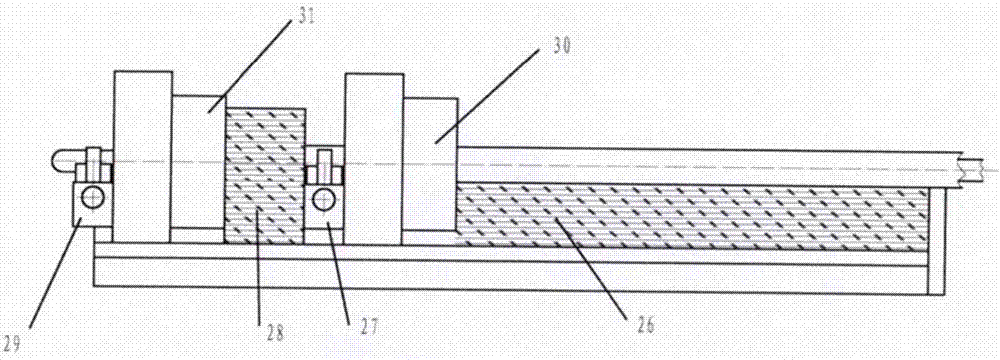
[0023] Such as Figure 1-3 as shown,
[0024] A slave hand of a vascular interventional surgery robot for controlling a catheter-guide wire, which includes two hollow ultrasonic motors 22, 23, two linear ultrasonic motors 24, 25, and two ordinary motors 18, and the linear ultrasonic motor drives the hollow ultrasonic motor along the guide rail Move to drive the guide wire or catheter to move linearly, and two ordinary motors are used to drive two locking mechanisms 27, 29 to clamp the guide wire 12 and catheter 21; the two locking mechanisms are respectively connected to the rotors of the corresponding hollow ultrasonic motors In solid connection, the guide wire and catheter are respectively positioned in their respective locking mechanisms and are coaxial with the rotation center of the hollow ultrasonic motor, pass through the hollow ultrasonic motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More