

Muscle traction device
A pulling device and muscle technology, applied in the field of medical equipment, can solve problems such as unstable manual force, troublesome operation, and physical and energy consumption of surgeons, so as to ensure smooth operation, reduce the influence of human factors on the operation, and strengthen the operation. The effect of stretch controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the technical means, creative features, objectives and effects of the present invention easy to understand, the present invention will be further explained below in conjunction with specific embodiments.
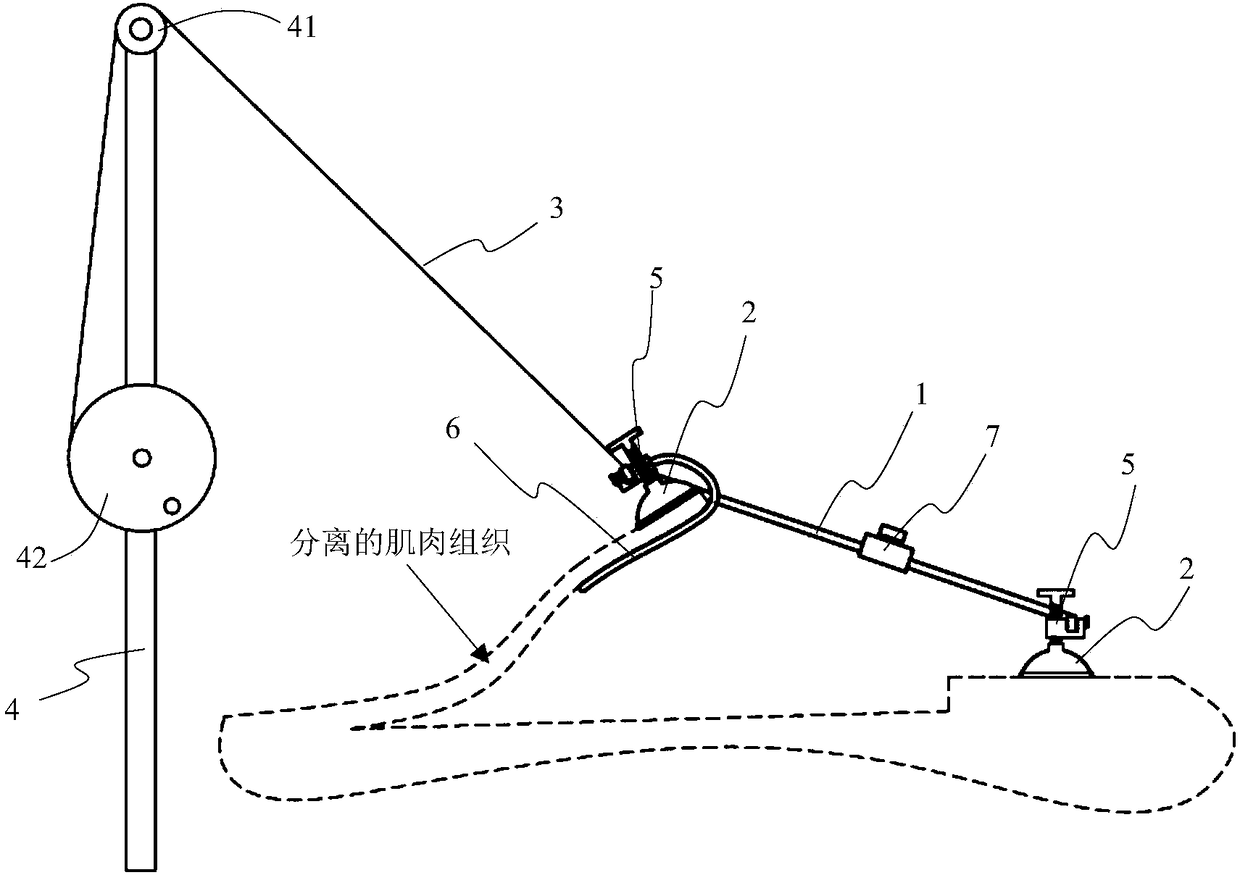
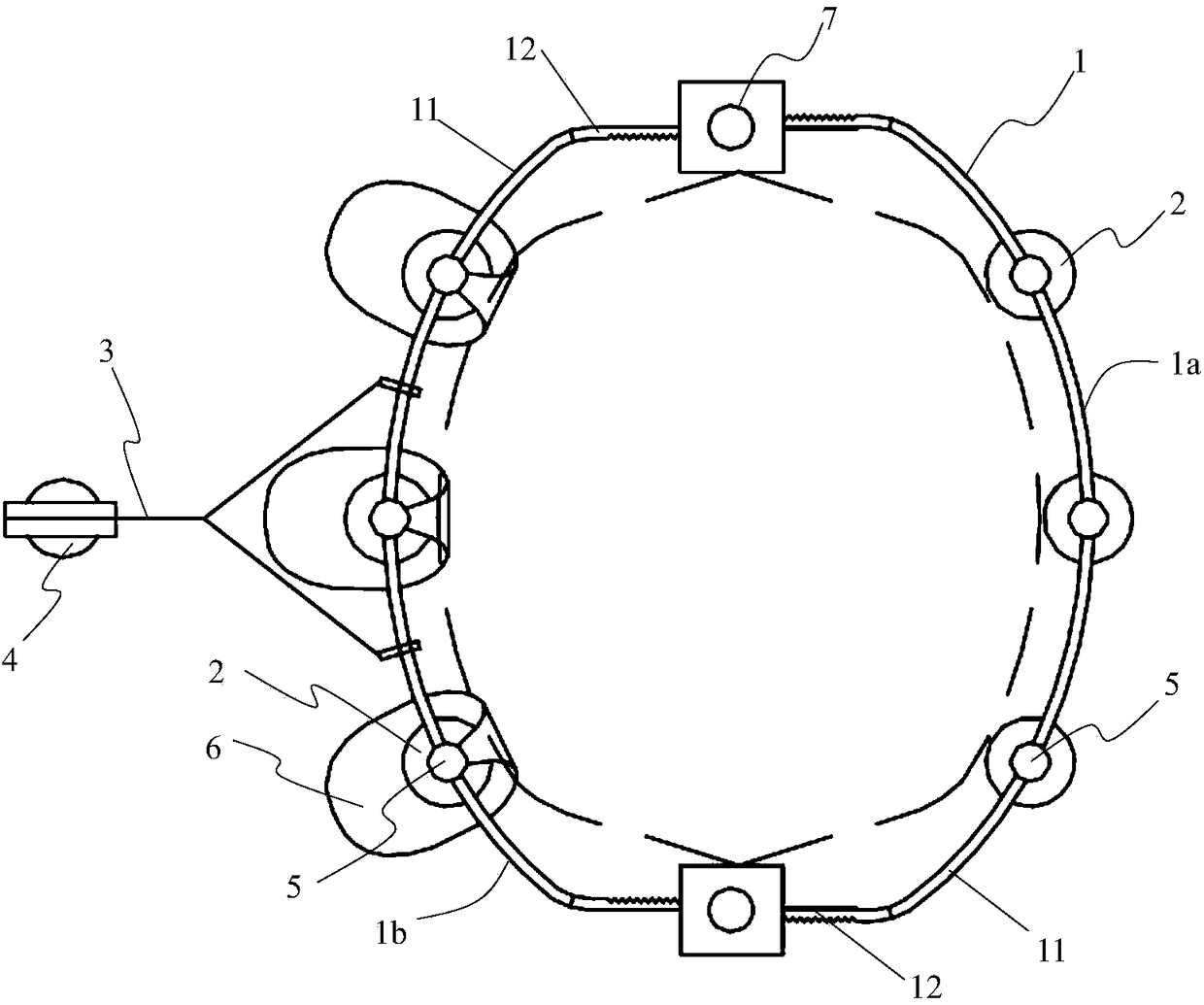
[0030] Such as Figure 1 to Figure 7 As shown, the muscle pulling device provided by this embodiment includes: a support ring 1, a suction cup 2, a pull wire 3, and a support rod 4; the support ring 1 includes: both are composed of an arc portion 11 and two arranged on the arc portion 11. The first supporting half ring 1a and the second supporting half ring 1b are composed of the connecting portion 12 at the end. The two connecting portions 12 on the same supporting half ring (including the first supporting half ring 1a and the second supporting half ring 1b) are parallel to each other Extending to the side of the center of the arc 11, the two connecting parts 12 of the two supporting half-rings are telescopically connected to form the supporting ring 1,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More