Identification method of six-degree-of-freedom serial robot tail-end load kinetic parameters
A technology of dynamic parameters and identification method, which is applied in the field of identification of dynamic parameters of the terminal load of a six-degree-of-freedom serial robot, can solve the problems of dynamic parameter solutions not meeting constraints, high algorithm complexity, and link mass less than zero.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
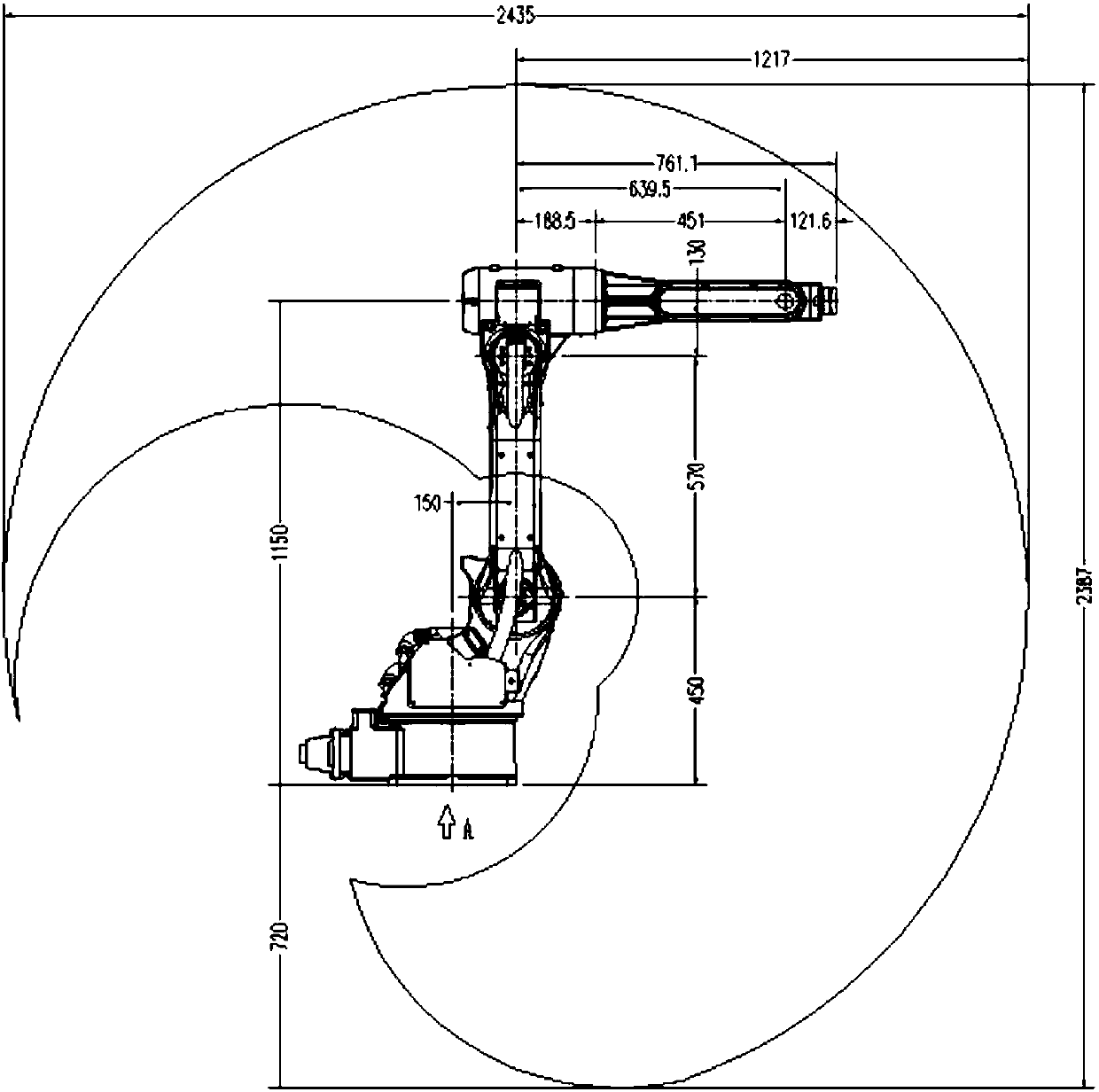
[0052] The present invention takes Huazhong CNC 6008 six-degree-of-freedom serial robot as an example, and the structure of the six-degree-of-freedom serial robot is as follows: figure 1 As shown in Table 1, the connecting rod parameters of the six-degree-of-freedom series robot are shown in Table 1. In Table 1, i represents the i-th joint of the robot, and a i-1 Indicates the axis z of the jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More