

A six-degree-of-freedom compliant parallel robot system with large load
A robotic system and a degree of freedom technology, applied in the field of manipulators, which can solve the problems of tension but not compression, compliant hinge tension but not compression, flexion and instability of compliant hinge, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
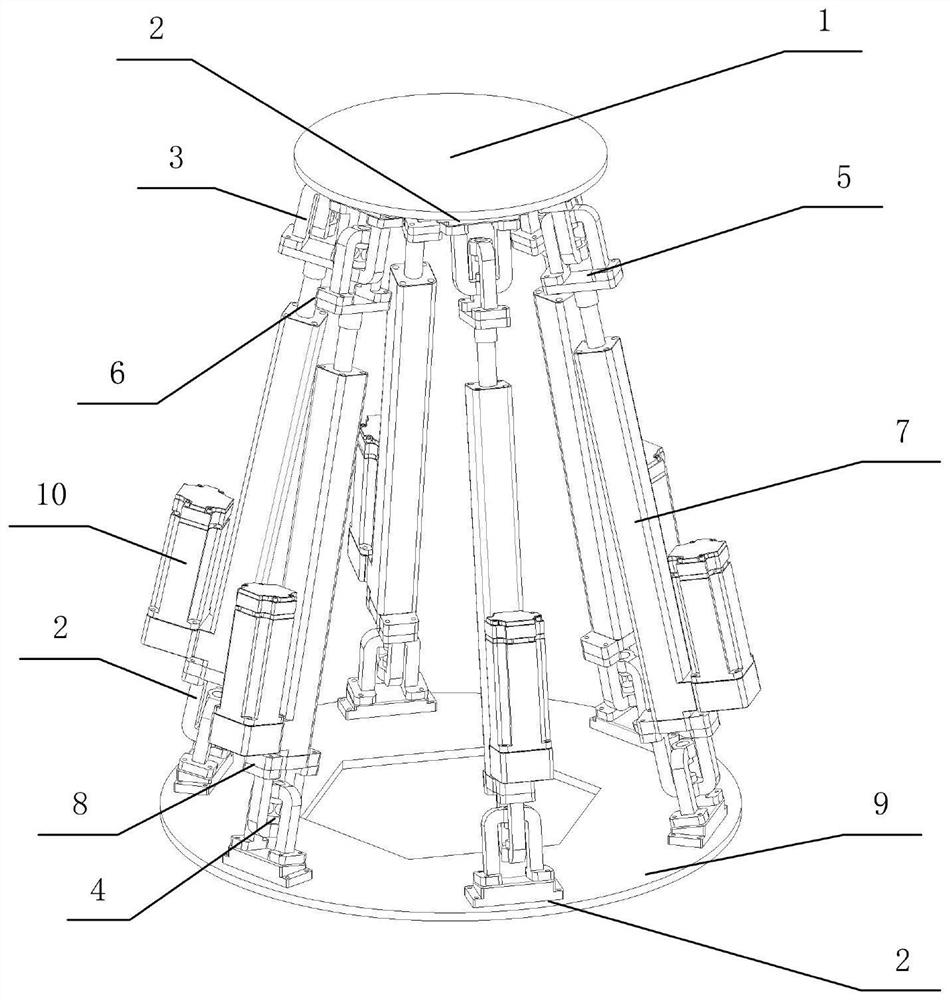
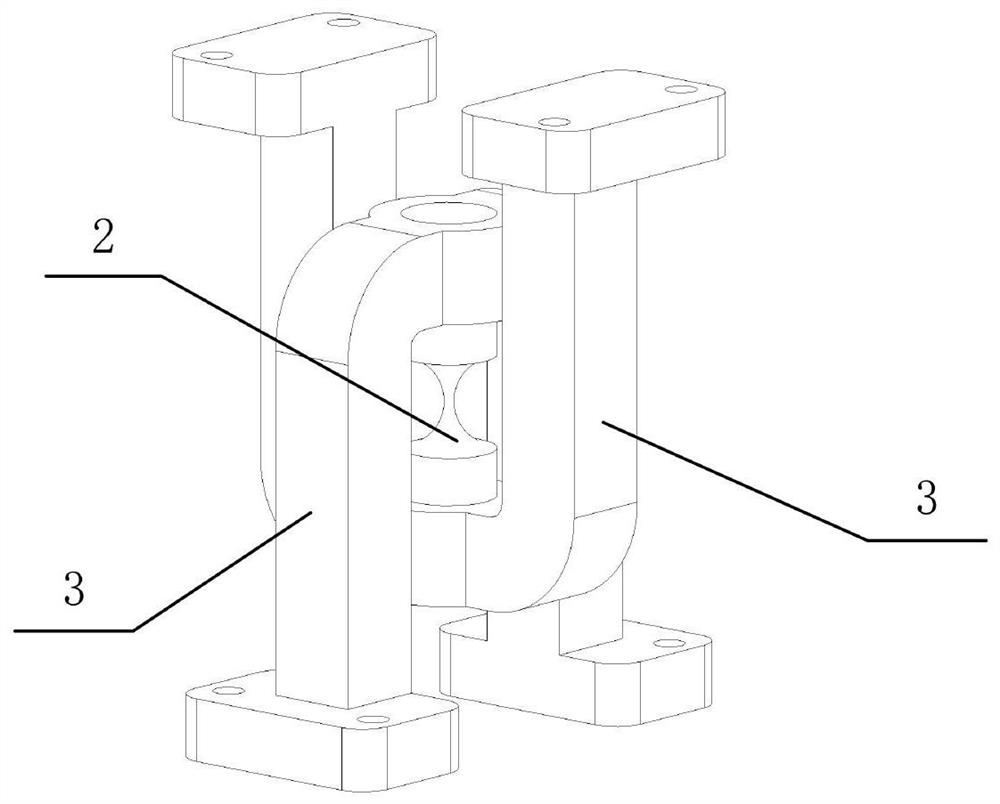
[0031] In the present invention, a force steering component is formed by combining two facing U-shaped pieces and a compliant ball hinge, so that the compliant hinge can bear axial tension during the working process and avoid buckling deformation caused by pressure, so that the large load has six degrees of freedom The compliant parallel robot system can not only meet the micron-level precision requirements that traditional six-degree-of-freedom mechanisms cannot achieve, but also solve the instability problem of general six-degree-of-freedom compliant parallel robot mechanisms under heavy loads.
[0032] like figure 1 As...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More