

UAV Turning Track Planning Algorithm Based on Minimum Turning Radius
A technology of turning radius and track planning, applied in navigation calculation tools and other directions, can solve problems such as poor engineering practicability and algorithmic path cost to be optimized, and achieve the effect of improving universality and reducing path cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
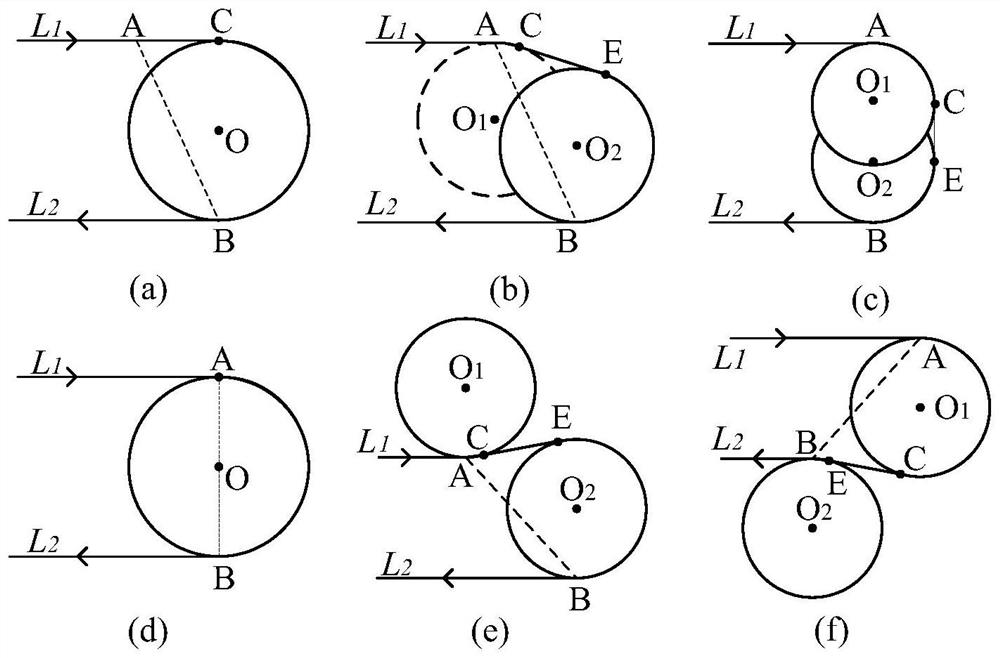
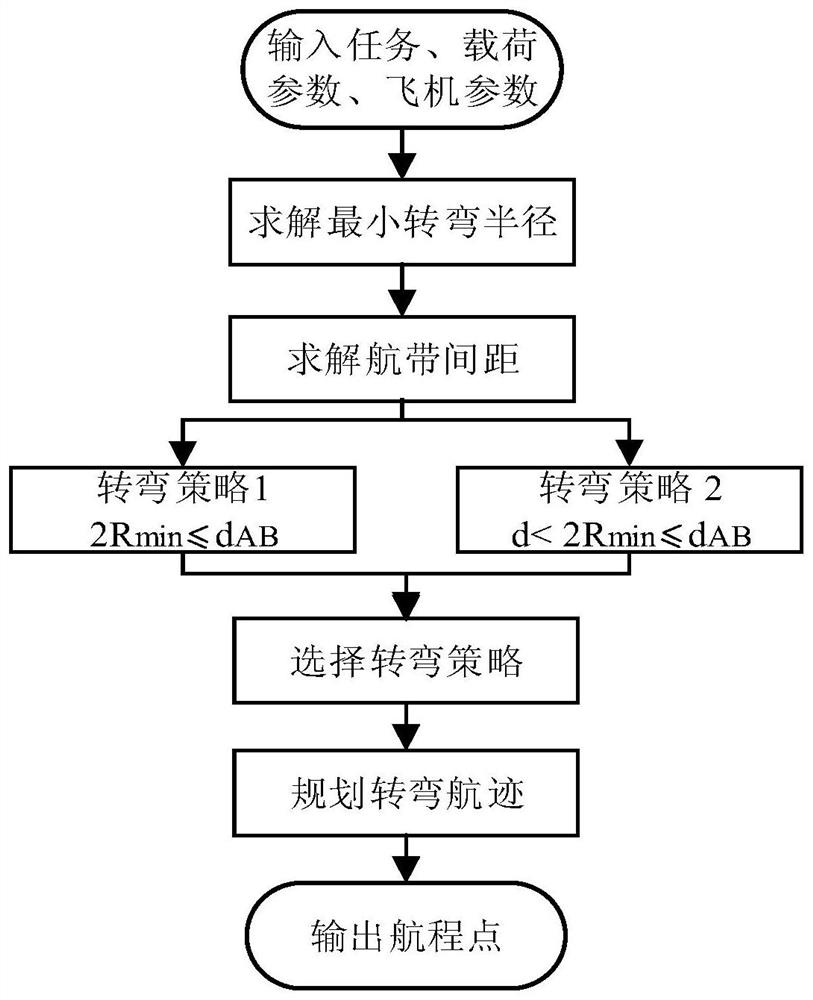
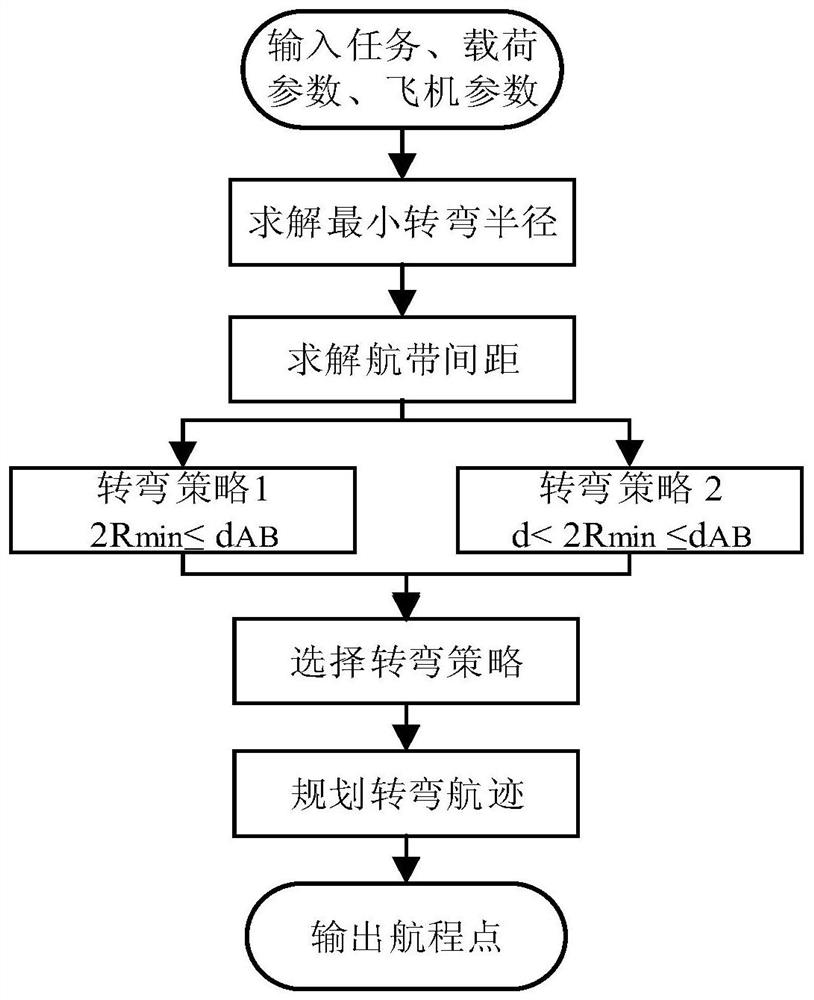
[0032] like figure 1 and 2 As shown, a UAV turning track planning algorithm based on the minimum turning radius, the specific steps are as follows:
[0033] Step 1: Obtain algorithm parameters. Obtain UAV parameters, load parameters, and the starting and ending coordinates of the turning track; the specific method is:
[0034] (101) Obtain the flight speed, maximum roll angle, flight height, lateral overlap rate, load field of view angle, and starting and ending coordinates of the turning track of the UAV.
[0035] Step 2: Find the minimum turning radius R min . According to the parameters of the UAV, the value of the minimum turning radius of the UAV is solved; the specific method is:
[0036] (201) According to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More