

Singularity avoidance method and device in force-controlled traction process for robot
A robot and singularity-avoiding technology, applied in the field of robotics, can solve problems such as poor operating experience and low efficiency of force-controlled traction operations, and achieve the effect of improving operating efficiency and improving operating experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
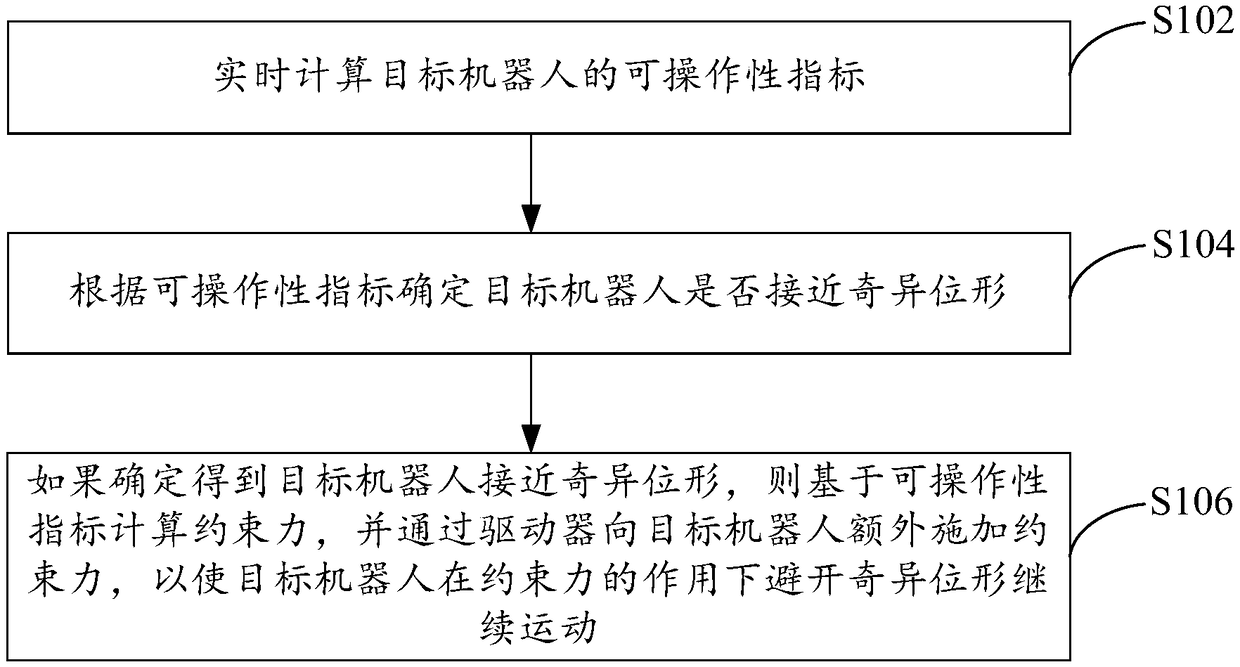
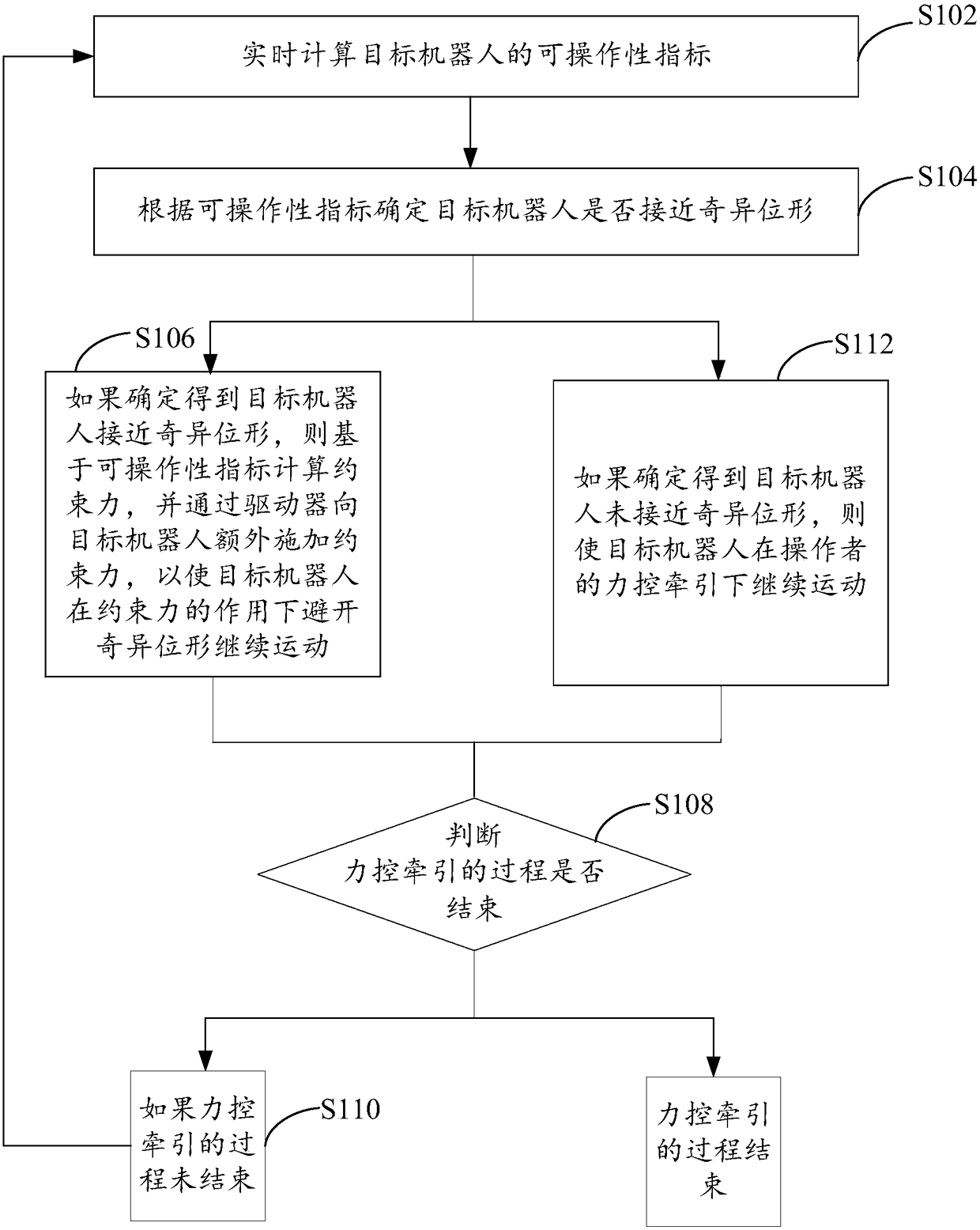
[0056] A singularity avoidance method in the force-controlled traction process of a robot, applied to the controller, refer to figure 1 , the method includes:
[0057] S102. Calculate the operability index of the target robot in real time, wherein the target robot is a robot that is force-controlled and pulled by an operator in a Cartesian space;
[0058] In the embodiment of the present invention, the process of force-controlled traction is performed in Cartesian space. Specifically, in force-controlled traction, the operator grasps the end of the robot to perform a force-controlled traction operation on the robot in Cartesian space, and the robot is the target robot. The process of calculating the operability index will be described below, and will not be repeated here.
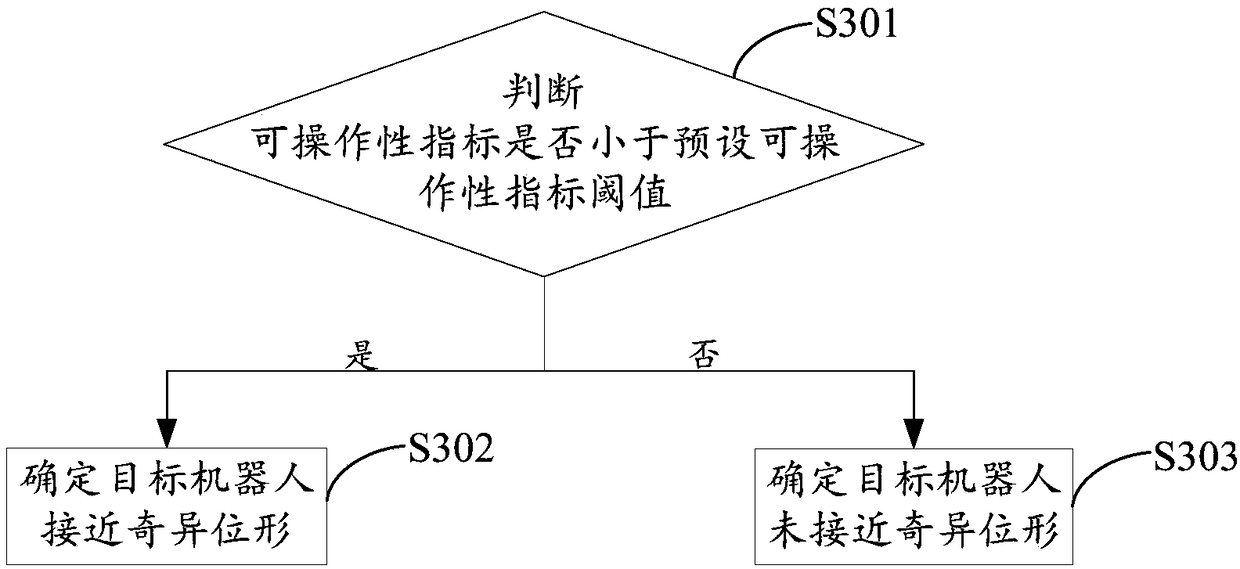
[0059] S104. Determine whether the target robot is close to a singular configuration according to the operability index;
[0060] After obtaining the maneuverability index, determine whether the target r...
Embodiment 2
[0104] A strange avoidance device in the force-controlled traction process of a robot, applied to the controller, refer to Image 6 , the device consists of:
[0105] The first calculation module 11 is used to calculate the operability index of the target robot in real time, wherein the target robot is a robot that is force-controlled and pulled by the operator in Cartesian space;
[0106] Determining module 12, is used for determining whether target robot is close to singular configuration according to operability index;
[0107] The second calculation module 13, if it is determined that the target robot is close to the singular configuration, then calculate the constraint force based on the operability index, and apply additional constraint force to the target robot through the driver, so that the target robot can avoid the singular configuration under the constraint force. The configuration continues to move.
[0108] In the singularity avoidance device in the force-contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More