

Parking AGV (automated guided vehicle) and automobile butting and positioning method and parking AGV
A positioning method and technology for automobiles, which are applied in two-dimensional position/navigation control, vehicle position/route/altitude control, motor vehicles and other directions, and can solve problems such as damaged cars
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
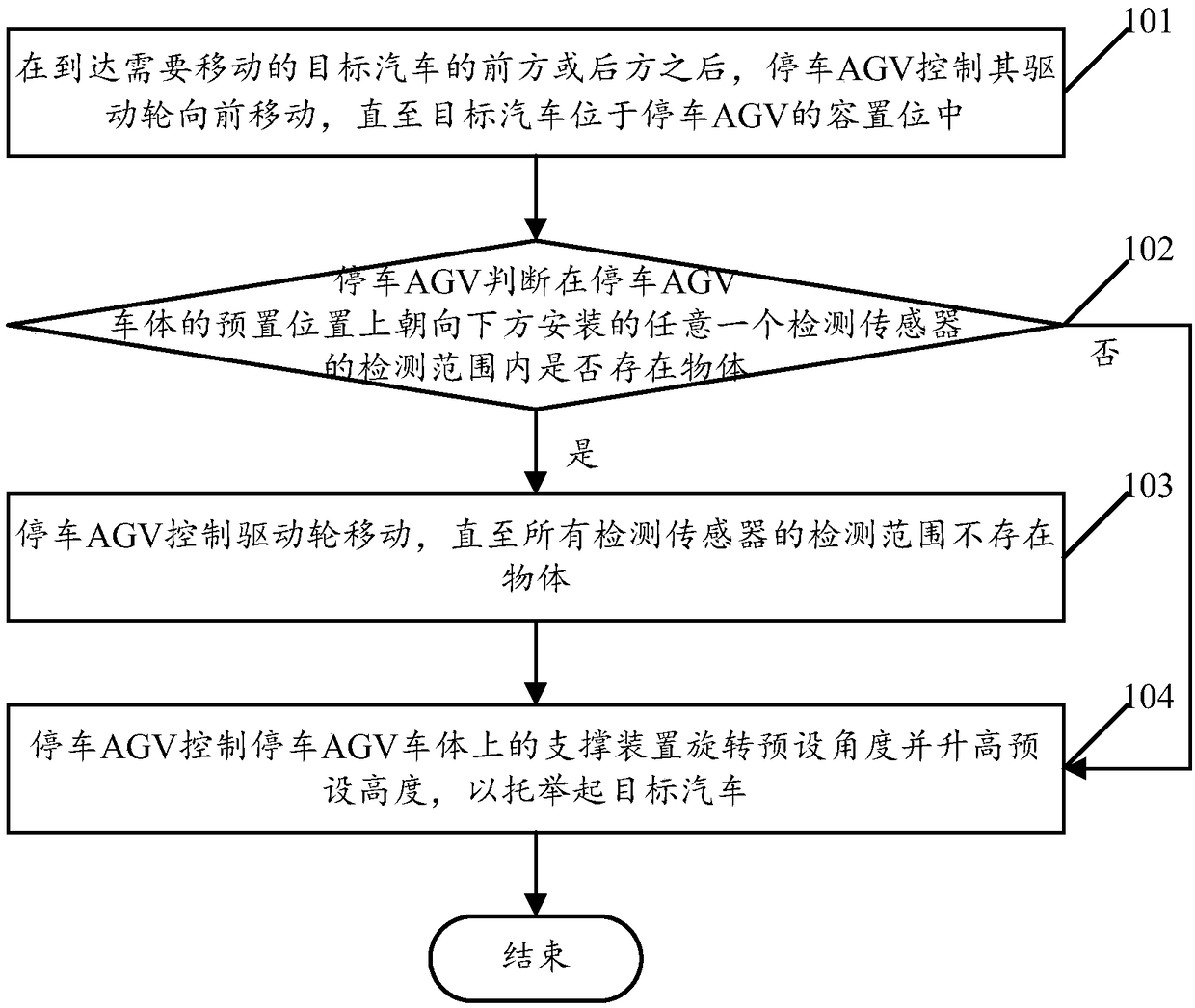
[0064] see figure 1 , figure 1 It is a schematic flowchart of a docking positioning method between a parking AGV and a car disclosed in an embodiment of the present invention. Such as figure 1 As shown, the docking positioning method of the parking AGV and the car may include the following steps:
[0065] 101. After reaching the front or rear of the target car that needs to be moved, the parking AGV controls its driving wheels to move forward until the target car is located in the accommodation position of the parking AGV.
[0066] In the embodiment of the present invention, the parking AGV can be in a wandering state in the space where it is located in a folded manner until it receives a car movement command that it can respond to; or, the parking AGV can be parked in the current space in a folded posture in advance The preset area until it receives a car movement command that it can respond to. After receiving the vehicle movement command and after confirming that the ve...
Embodiment 2
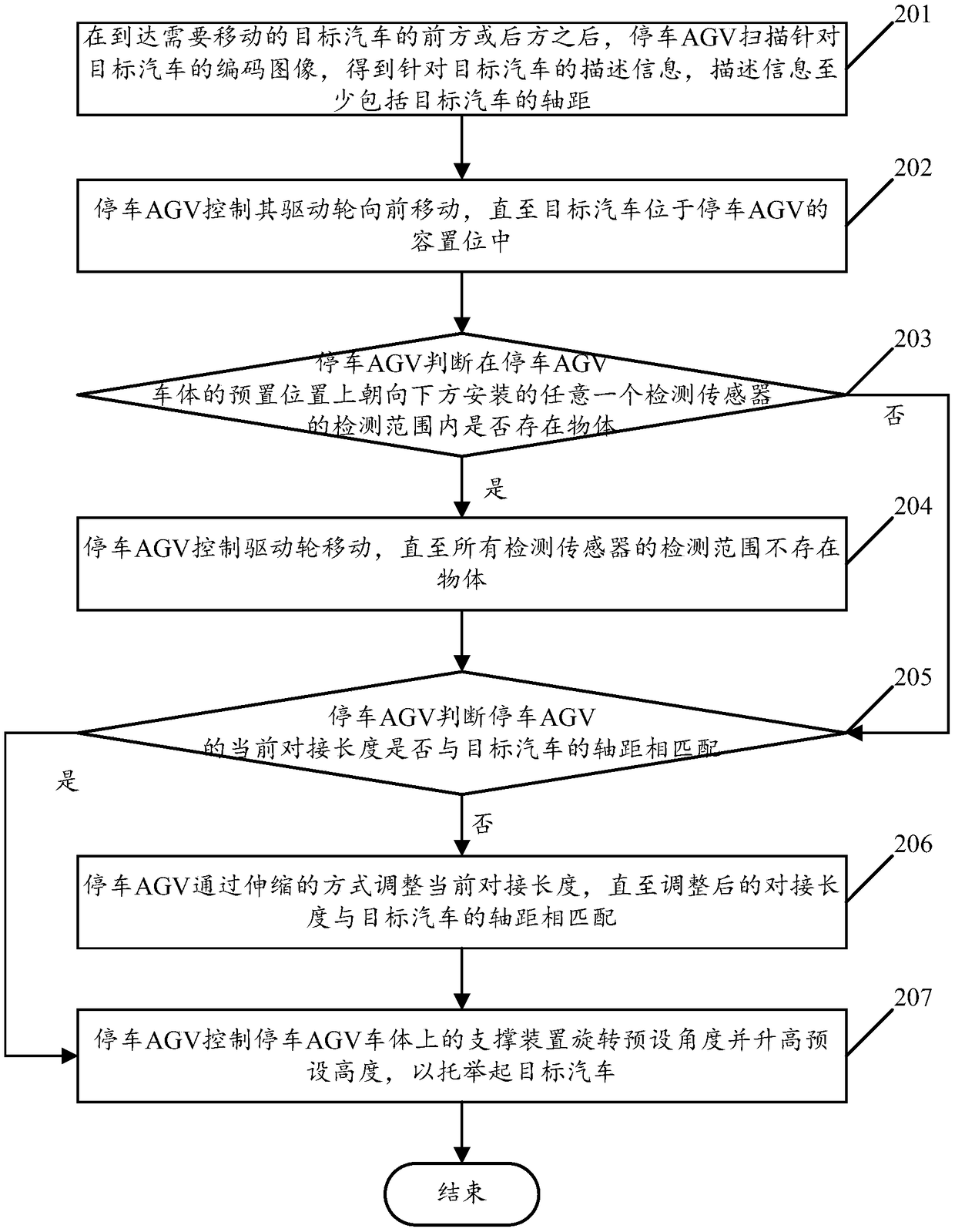
[0080] see figure 2 , figure 2 It is a schematic flowchart of another docking positioning method between a parking AGV and a car disclosed in an embodiment of the present invention. like figure 2 As shown, the docking positioning method of the parking AGV and the car may include the following steps:
[0081] 201. After arriving in front or behind the target car that needs to be moved, the parking AGV scans the coded image of the target car to obtain description information for the target car, and the description information includes at least the wheelbase of the target car.
[0082] In the embodiment of the present invention, a device (such as an LRD display screen) that displays a coded image for the target car can be provided next to the parking position of the target car, and the parking AGV can scan the coded image through a camera on the car body; or, When the parking AGV reaches the front or rear of the target car that needs to move, the parking AGV can send a vehi...
Embodiment 3
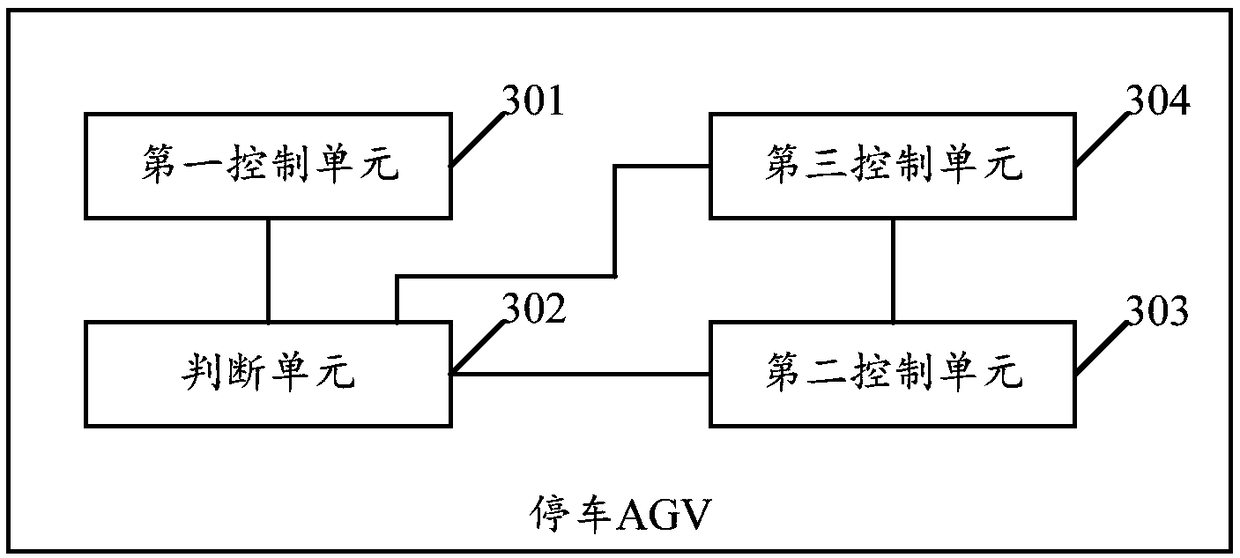
[0113] see image 3 , image 3 It is a structural schematic diagram of a parking AGV disclosed in an embodiment of the present invention. like image 3 As shown, the parking AGV may include a first control unit 301, a judgment unit 302, a second control unit 303, and a third control unit 304, wherein:
[0114] The first control unit 301 is used to control the driving wheels of the parking AGV to move forward after the parking AGV reaches the front or rear of the target car to be moved until the target car is located in the accommodation position of the parking AGV.
[0115] The judging unit 302 is used for judging any one of the parking AGVs installed downwards at the preset position of the parking AGV body after the first control unit 301 controls its drive wheels to move forward until the target car is in the accommodation position of the parking AGV. Detects the presence of an object within the detection range of the sensor.
[0116] In the embodiment of the present inv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More