

Steering control method and steering control device
A steering control and steering angle technology, which is applied to steering mechanisms, electric steering mechanisms, power steering mechanisms, etc., can solve the problems of not considering the influence of the steering characteristics of the wheel steering angle, and the difficulty of guaranteeing the control accuracy of the wheel steering angle, so as to improve the transmission efficiency. Accuracy and steering accuracy, preventing excessive power, and ensuring the effect of control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0052] The technical solutions of the present invention will be further described in detail below through the accompanying drawings and embodiments.
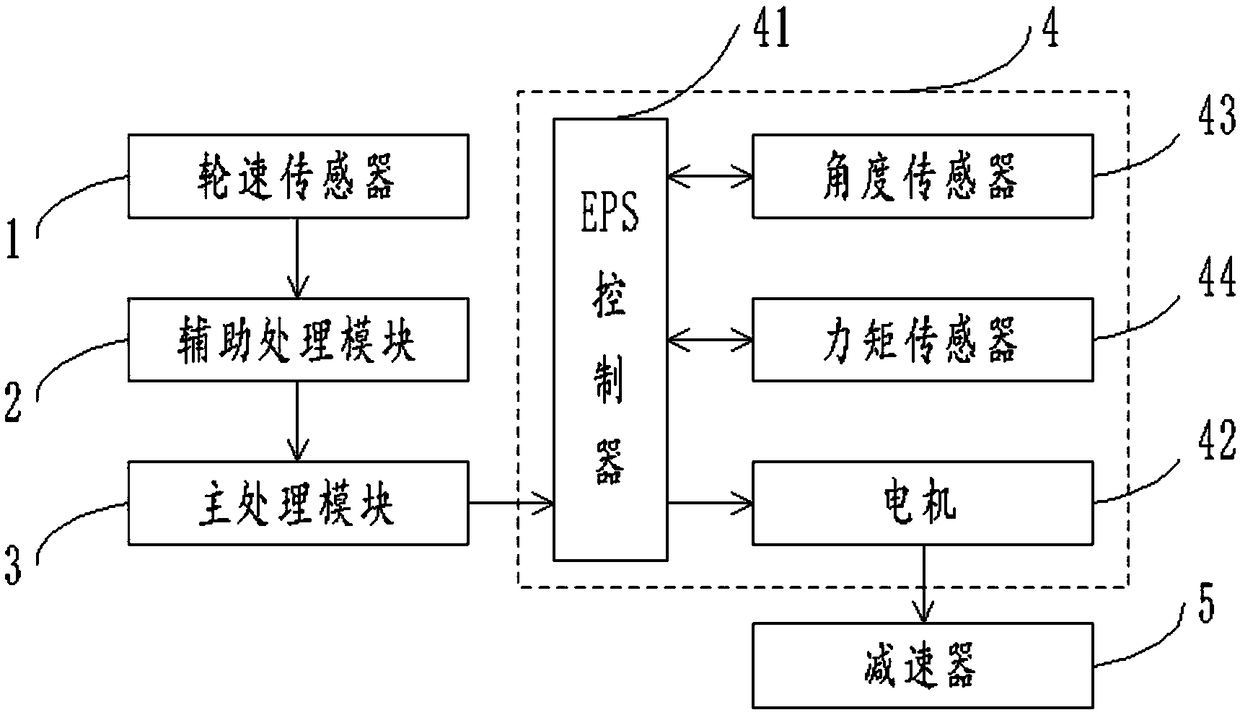
[0053] To make it easier to understand the steering control method provided in the embodiments of the present invention, firstly, combine figure 1 The steering control device used in the steering control method is introduced.
[0054] The steering control device includes a wheel speed sensor 1, an auxiliary processing module 2, a main processing module 3, an electric power steering system (Electric Power Steering, EPS) 4, and a reducer 5.
[0055] Specifically, the wheel speed sensor 1 is installed at the wheels of the vehicle chassis to monitor the speed of the wheels, and output pulse signals through the speed signal output interface, thereby transmitting the pulse signals to the auxiliary processing module 2; the auxiliary processing module 2 is used to assist the main processing Module 3 works, the wheel speed sensor 1 outputs puls...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More