

Emergency command and control fixed-wing UAV ship surface emergency take-off control method
A control method and emergency command technology, applied in attitude control, control/regulation system, non-electric variable control and other directions, can solve the problems of weak robustness, slow dynamic response, fluctuating drones, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
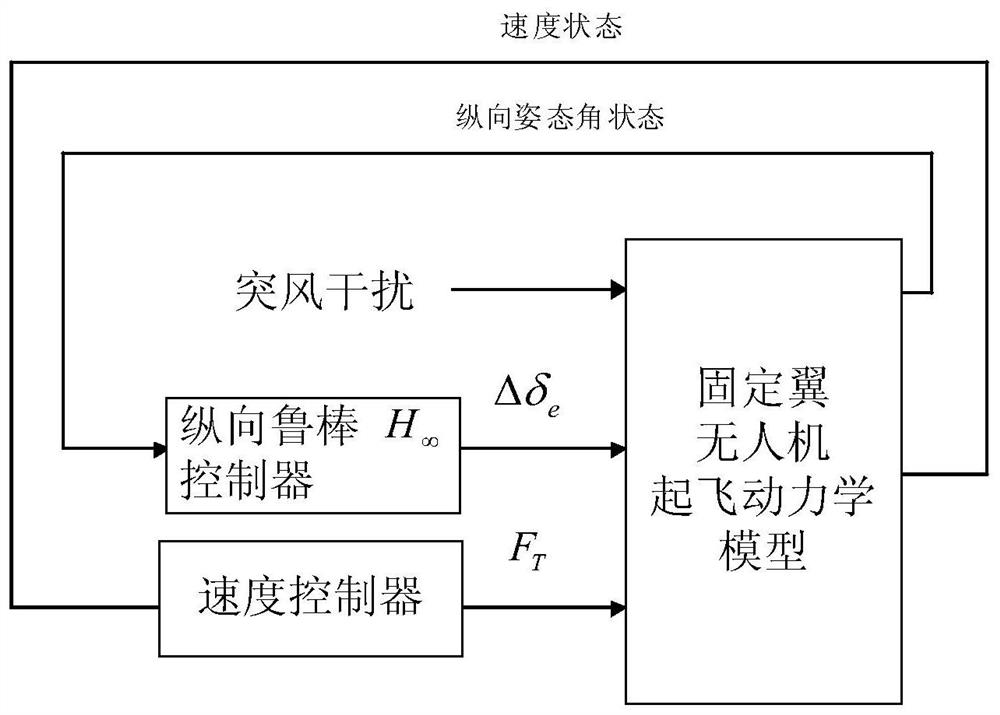
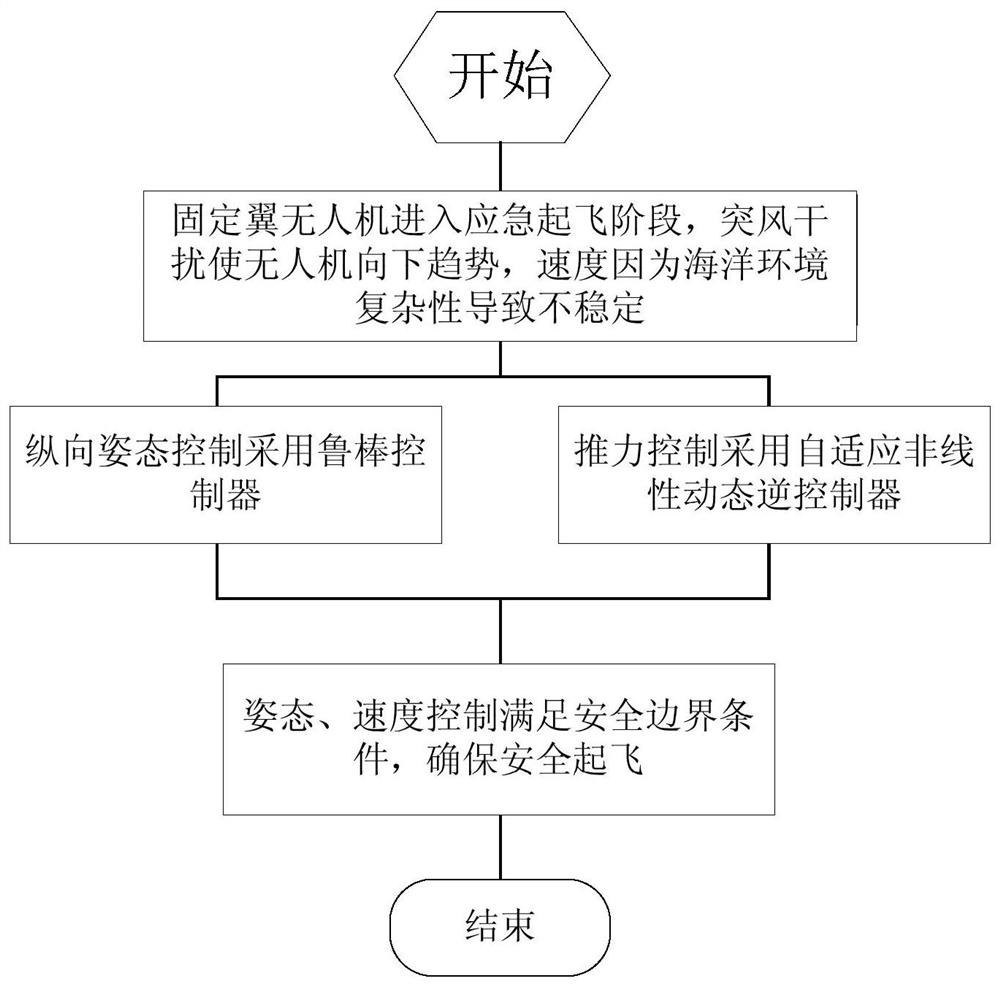
[0039] like figure 1 and figure 2 As shown, an emergency command and control method for emergency take-off of fixed-wing unmanned aerial vehicles, including take-off longitudinal attitude control and take-off speed control; using robust H ∞ The controller controls the longitudinal take-off attitude of the fixed-wing UAV, and uses the adaptive dynamic inverse method to control the speed of the ship-borne fixed-wing UAV during the take-off stage.
[0040] 1. Take-off attitude control
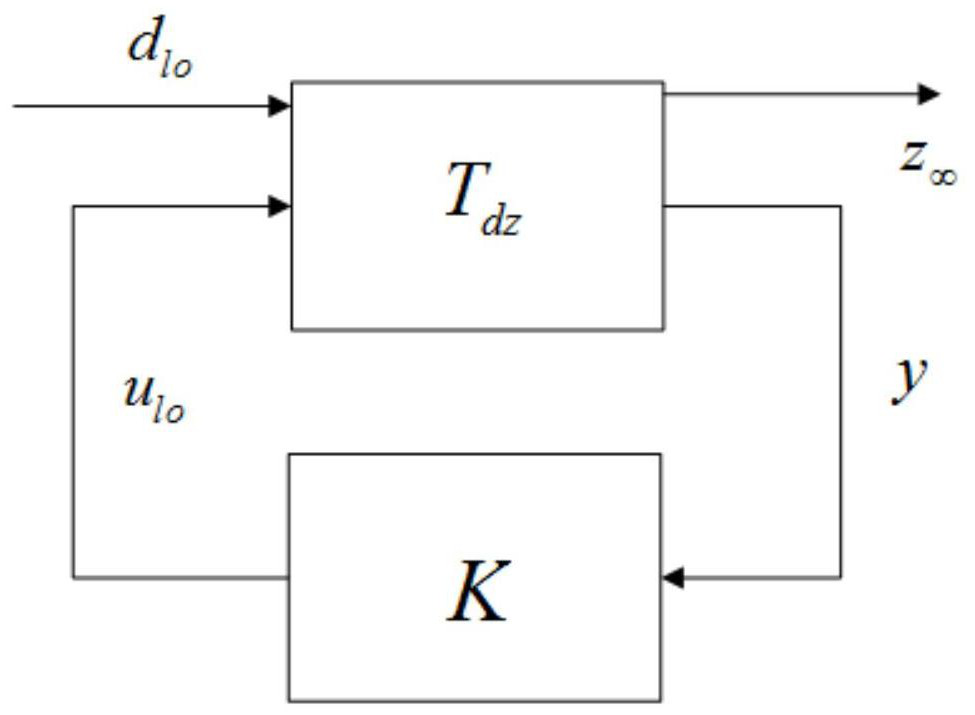
[0041] Vertical H ∞ Robust controller controls the take-off attitude of fixed-wing UAV, such as image 3 shown. exist image 3 middle, T dz is the take-off dynamics model of the fixed-wing UAV of the closed-loop control system, and K is the designed longitudinal robustness H ∞ Controller parameter matrix. Will longitudinally robust H ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More