Forklift equipment state comprehensive evaluation method, device and system
A technology of equipment status and comprehensive evaluation, applied in the direction of registration/indication of vehicle operation, instruments, registration/indication, etc., to ensure work efficiency, prolong service life, and ensure normal use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
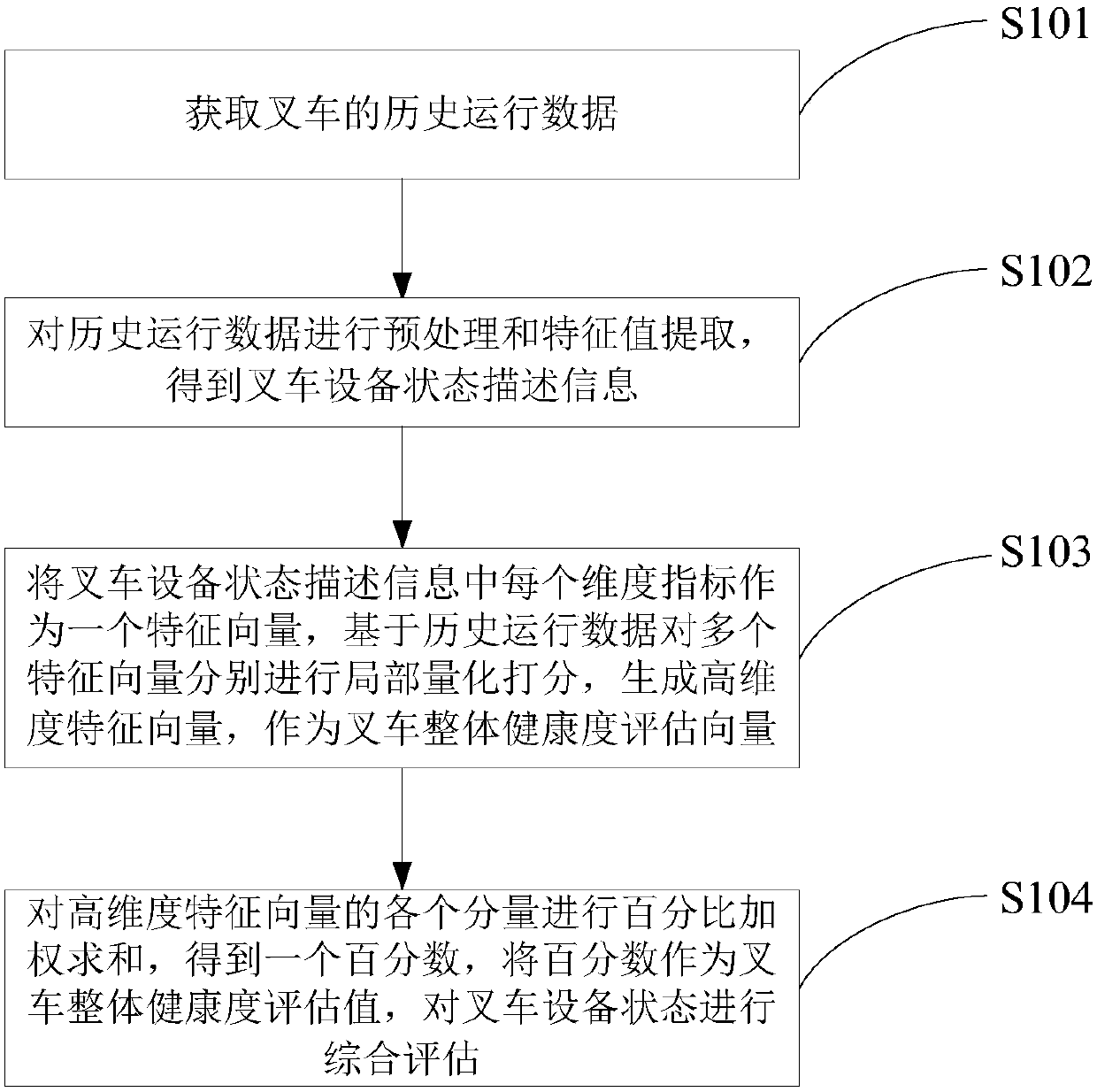
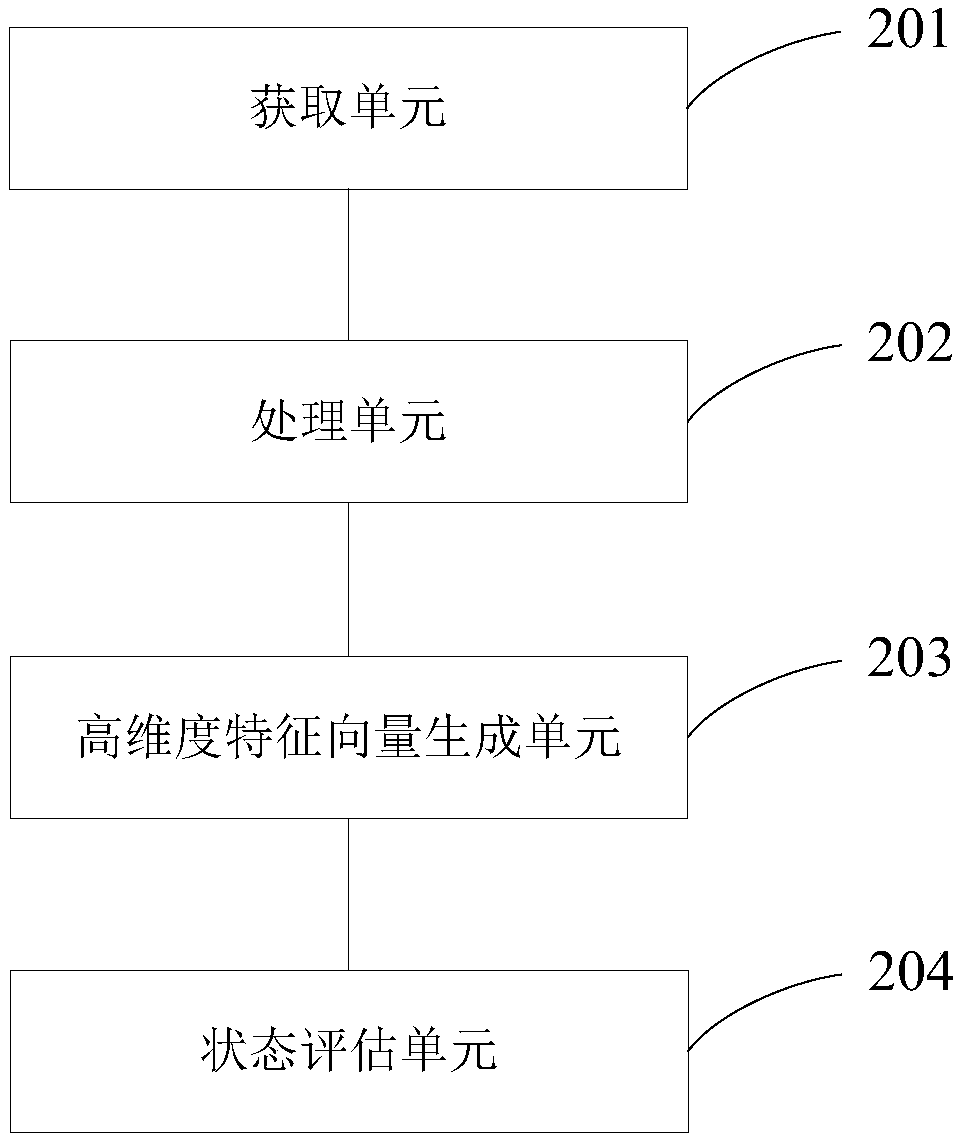
[0044] The embodiment of the present invention discloses a method, device and system for comprehensive evaluation of the state of forklift equipment. The historical operation data of the forklift is acquired, and preprocessing and feature value extraction are performed on the historical operation data to obtain the description information of the state of the forklift equipment, and the state of the forklift equipment is Each dimension index in the description i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



