

Adaptive floating body heading control method for wave glider
A control method and technology of glider, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as instability of the control system, achieve the effects of suppressing adverse effects, fewer parameters, and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042]A wave glider adaptive floating body heading control method comprises the following steps:
[0043] (1) Set the length of the sliding time window;
[0044] (2) The dynamic data storage queue is set, the size of its storage space corresponds to the set sliding time window size, the data structure adopts the queue form, and the elements therein are initialized to 0;
[0045] (3) Judging that the current control system is in the rapid adjustment stage or the steady state adjustment stage, if it is the rapid adjustment stage, then enter step (4); if it is the steady state adjustment stage, then enter step (5);
[0046] (4) Insert a "0" element at the back end of the dynamic data storage queue, and delete an element at the front end of the dynamic data storage queue, and enter step (6);
[0047] (5) Insert the heading difference of the floating body and the submerged body at the back end of the dynamic data storage queue at the current moment, and delete an element at the fr...
Embodiment 2
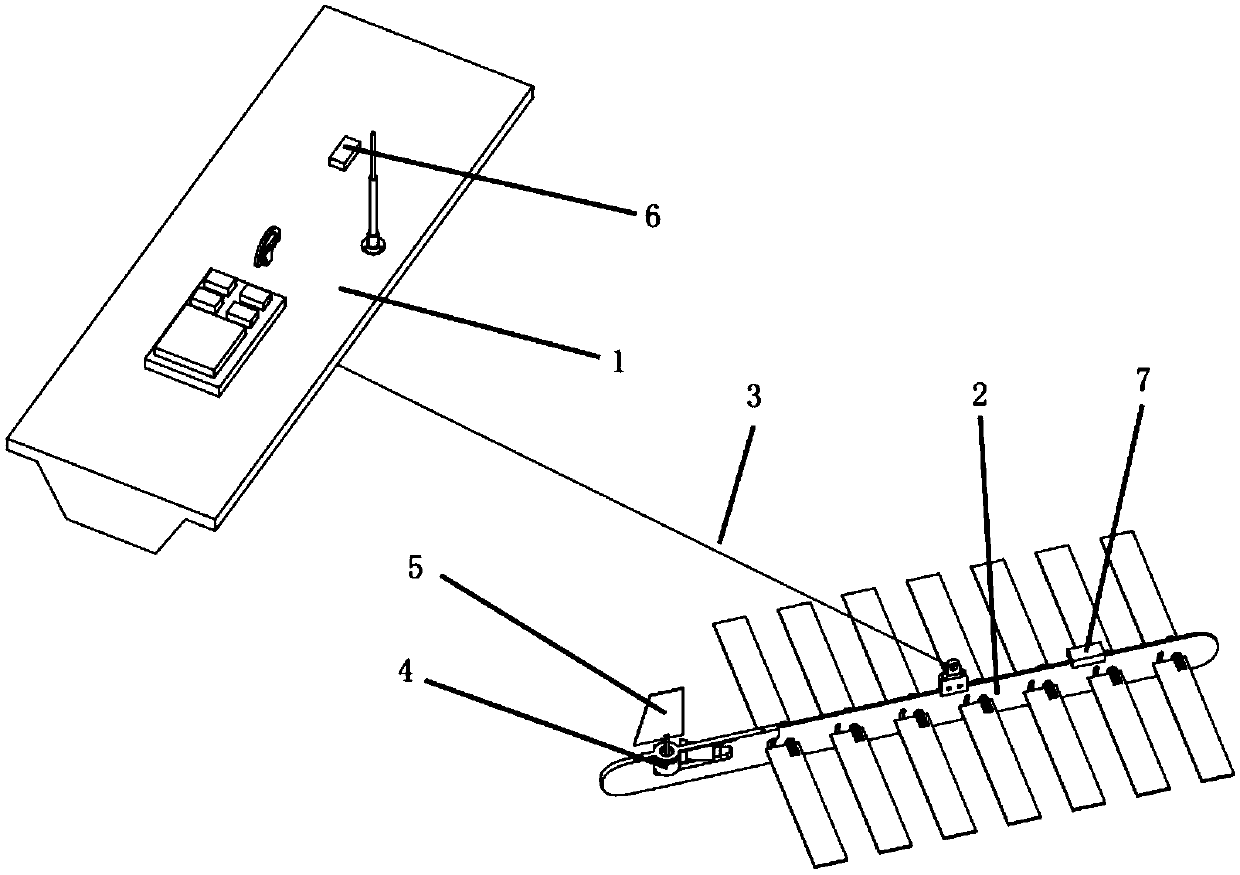
[0056] combine figure 1 Explain the wave glider and its hardware structure. The wave glider is composed of a floating body 1, a submersible body 2 and an umbilical cord 3, and the floating body 1 and the submersible body 2 are connected through the umbilical cord 3. The steering gear 4 of the wave glider is installed on the submerged body 2. Through the rudder force of the rudder plate 5, the steering of the submerged body 2 can be directly controlled. The turning moment of the floating body 1 comes from the tension of the umbilical cord 3. The floating body 1 and the submerged body 2 are respectively A heading sensor is installed, and the heading sensor 6 installed on the floating body and the heading sensor 7 installed on the submerged body respectively measure the heading ψ of the floating body F and the submerged heading ψ G .
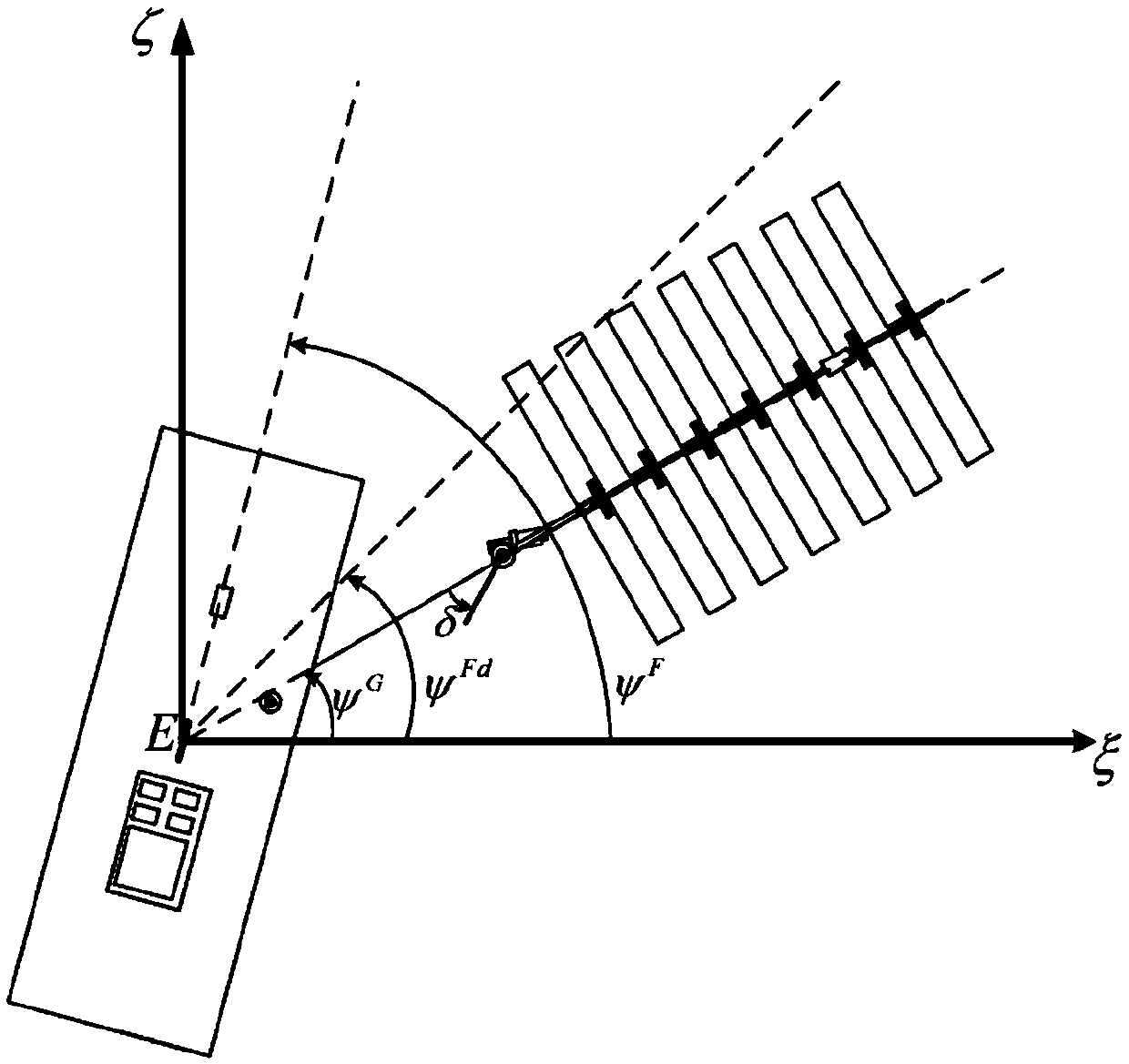
[0057] combine figure 2 Describe the establishment of the coordinate system. Only considering the motion of the wave glider on the horizonta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More