

Redundant robot repetitive motion planning method adopting parabolic final state neural network
A neural network, repetitive motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult implementation, low calculation accuracy, and inability to converge in a limited time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The present invention will be further described below in conjunction with the accompanying drawings.
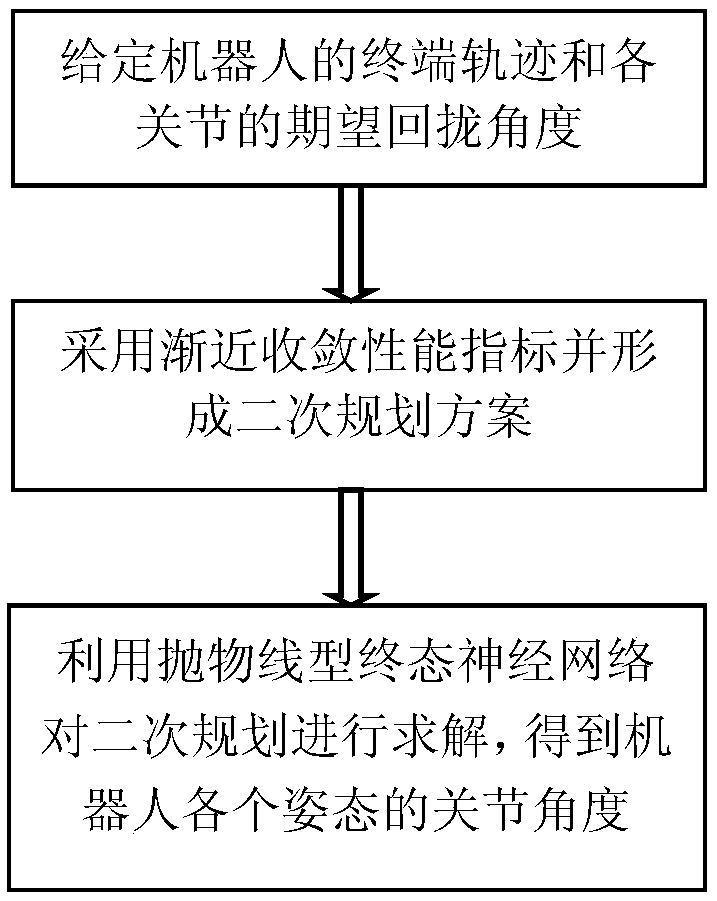
[0100] refer to Figure 1 to Figure 9 , a repetitive motion planning method for redundant robots using a parabolic final-state neural network, figure 1 It is a flow chart of the redundant robot repetitive motion planning scheme, which consists of the following three steps: 1. Determine the expected trajectory of the redundant robot end effector and the expected angles of each joint; 2. Adopt the asymptotic convergence performance index and form the redundant The quadratic planning scheme for repetitive motion of the robot; 3. Solve the quadratic programming problem with a parabolic final state neural network to obtain the angular trajectory of each joint, including the following steps:
[0101] 1) Determine the desired trajectory
[0102] Set the desired reunification of the redundant robot PA10 Determine the coordinates of the center of the circle trajectory (x=0....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More