

Redundant robot repetitive motion planning method with finite interval neural network adopted
A neural network, repetitive motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inefficiency, accidents and dangers, unable to guarantee motion repeatability, etc., to achieve low cost and high return angle accuracy. , the effect of fast convergence characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described below with reference to the accompanying drawings.
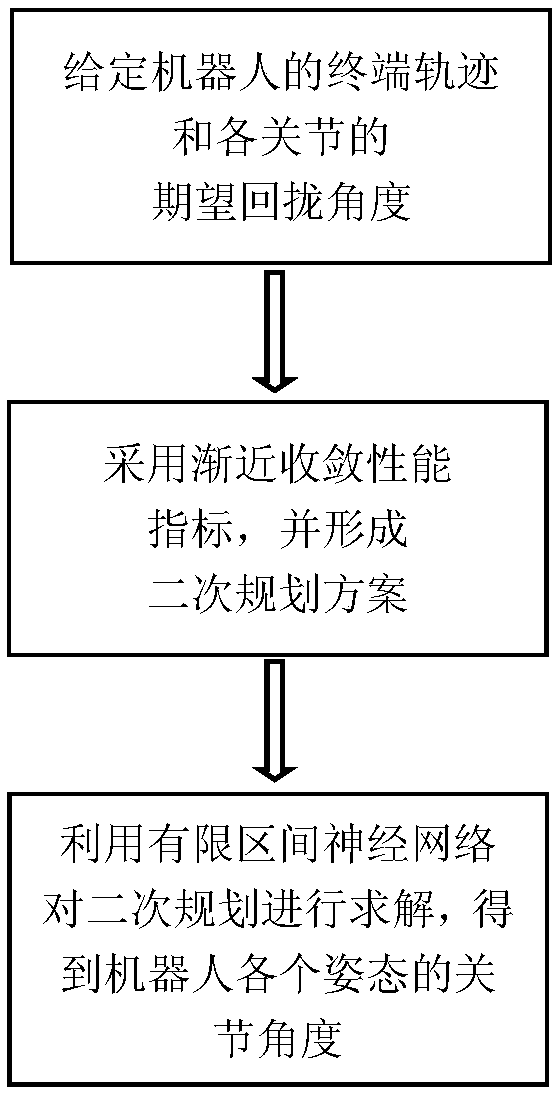
[0091] refer to Figure 1 to Figure 9 , a redundant robot repetitive motion planning method based on finite interval neural network, figure 1 The flowchart of the repetitive motion planning scheme for the redundant robot consists of the following three steps: 1. Determine the expected trajectory of the redundant robot end effector and the expected angle of each joint to close; 2. Adopt the asymptotic convergence performance index and form a redundant 3. Solve the quadratic programming problem with a finite interval neural network, and obtain the trajectory of each joint angle, as follows:
[0092] 1) Determine the desired trajectory
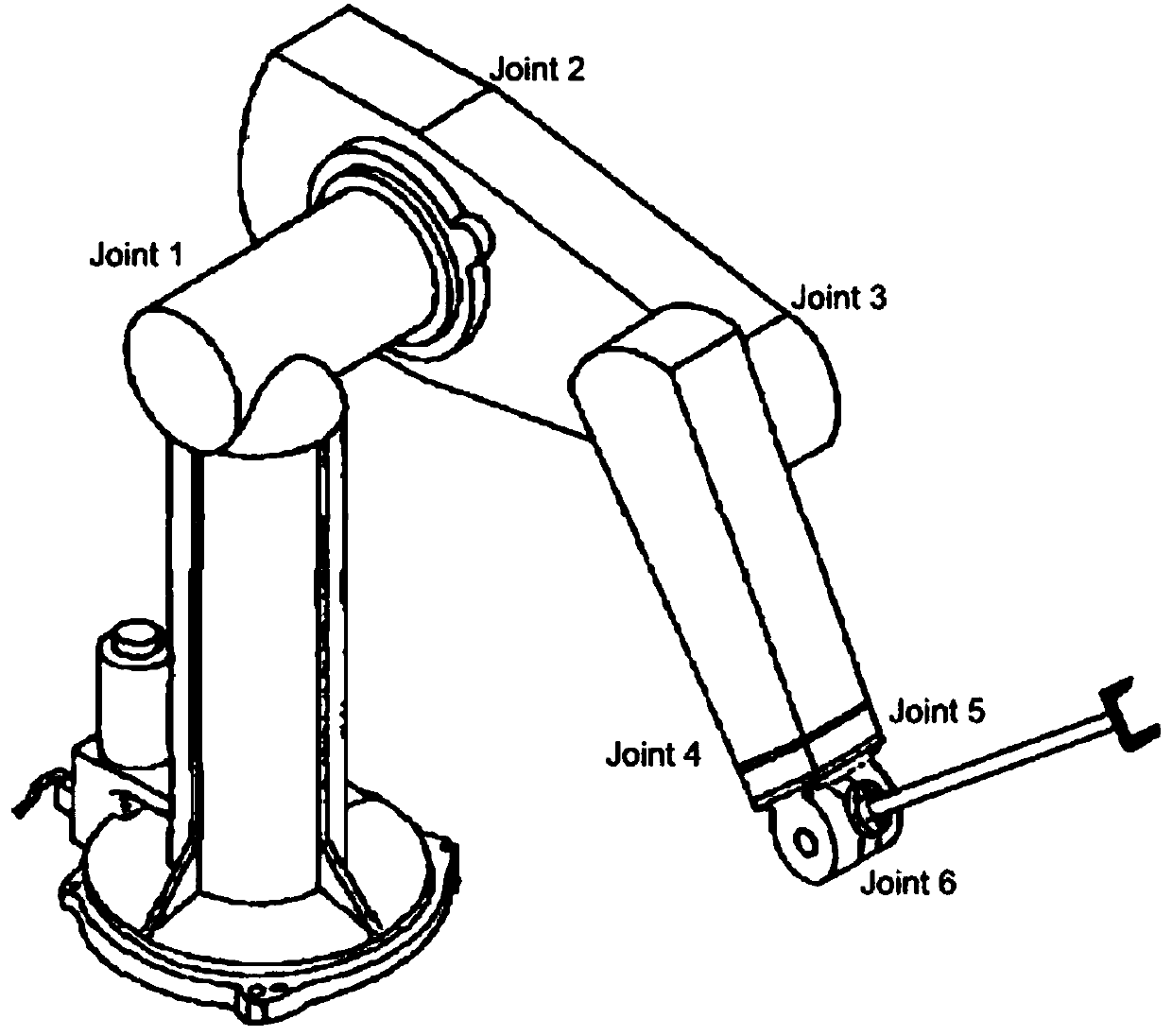
[0093] Set the expected retraction of the redundant robot PUMA560
[0094] Determine the coordinates of the center of the circle track
[0095] (x=0.2m, y=0, z=0), the radius of the circle is set to 0.2m, and the angle between the cir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More