

A Repeated Motion Planning Method for Redundant Robot Using Parabolic Final State Neural Network
A neural network, repetitive motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to converge in a limited time, difficult to achieve, and low calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099]The present invention will be further described below in conjunction with the drawings.
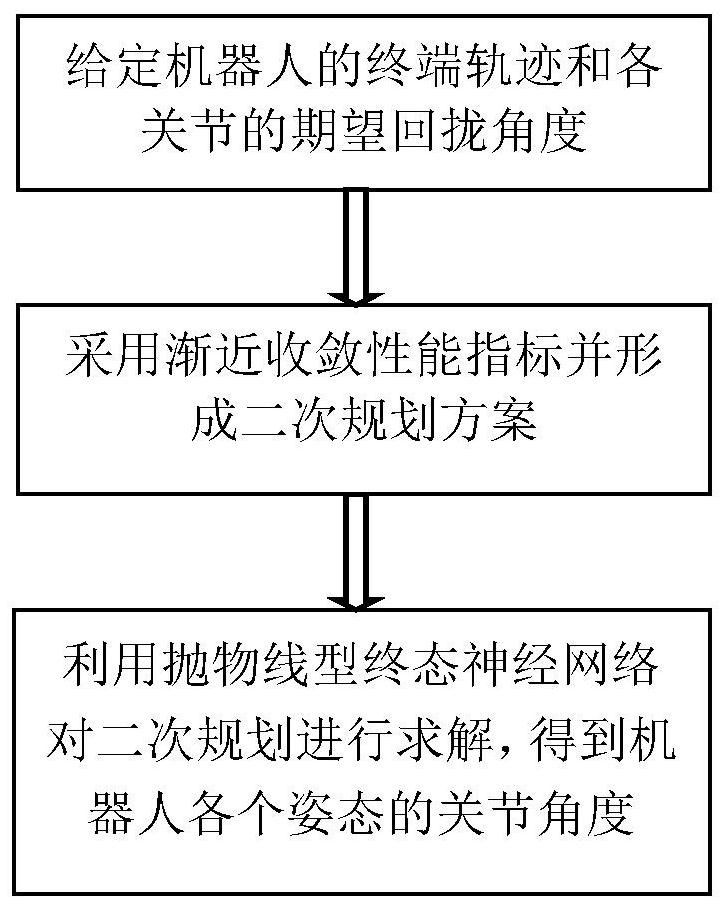
[0100]ReferenceFigure 1~Figure 9, A redundant robot repetitive motion planning method using parabolic final state neural network,figure 1 The flow chart of the redundant robot repetitive motion planning scheme consists of the following three steps: 1. Determine the expected trajectory and expected joint angle of the redundant robot end effector; 2. Use the asymptotic convergence performance index and form redundant robot repetition Motion secondary planning scheme; 3. Solve the secondary planning problem with a parabolic final state neural network to obtain the trajectory of each joint angle, including the following steps:
[0101]1) Determine the desired trajectory
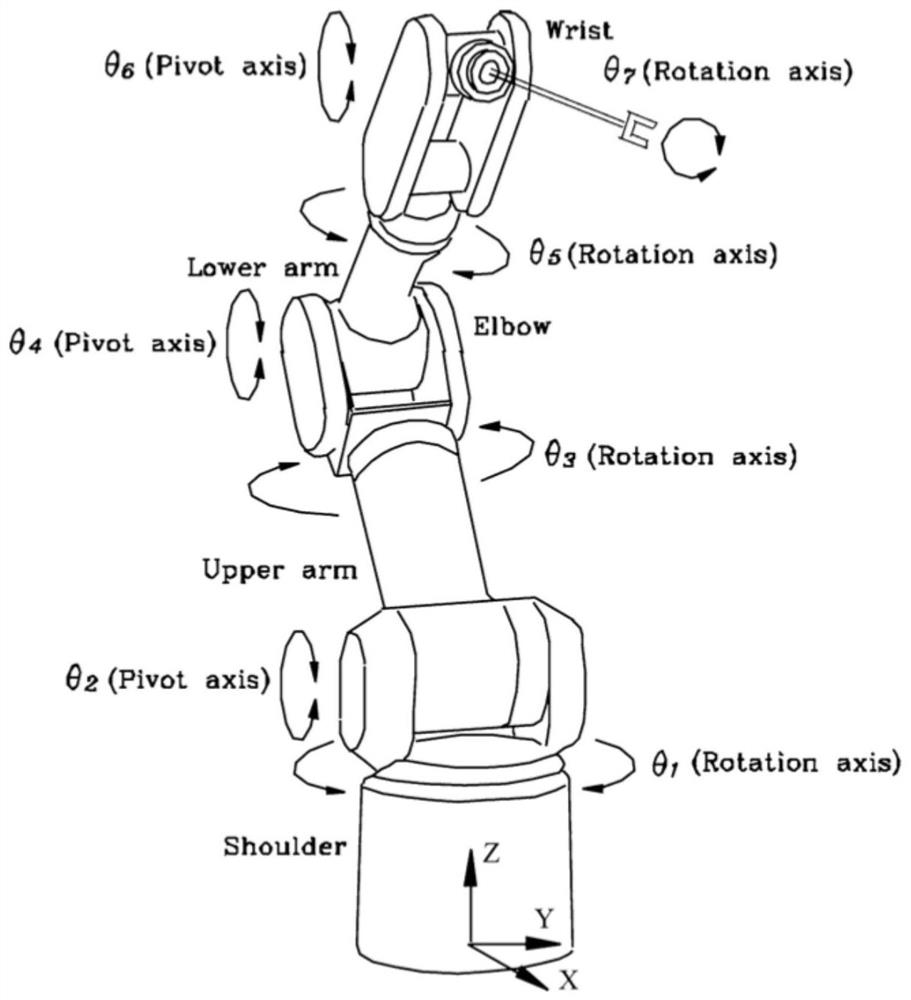
[0102]Set the expected joint angle of the redundant robot PA10Determine the center coordinates of the circle track (x=0.2m, y=0, z=0), set the radius of the circle to 0.2m, and the angle between the circular surface and the xy plane ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More