

A Redundant Robot Repeated Motion Planning Method Based on Quadratic Radical Final State Attraction
A repetitive motion, robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in implementing neural networks, and achieve the effects of high retraction angle accuracy, low cost, and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The specific implementation steps of the present invention will be further described below in conjunction with the accompanying drawings.
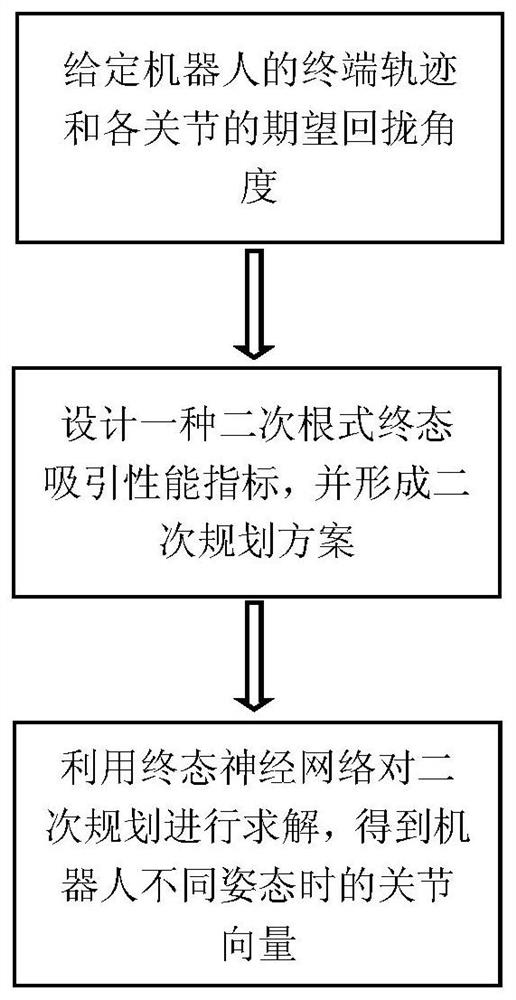
[0073] refer to Figure 1 to Figure 9 , a repetitive motion planning method for redundant robots based on quadratic radical final state attraction performance index, figure 1 It is a flow chart of the redundant robot repetitive motion planning scheme, which consists of the following three steps: 1. Determine the expected trajectory of the redundant robot end effector and the expected angles of each joint; 2. Establish the redundant robot with the final state attraction optimization index Repeated motion quadratic programming scheme; 3. Solve the quadratic programming problem with the finite value final state neural network to obtain the trajectory of each joint angle. details as follows:
[0074] 1) Determine the desired trajectory
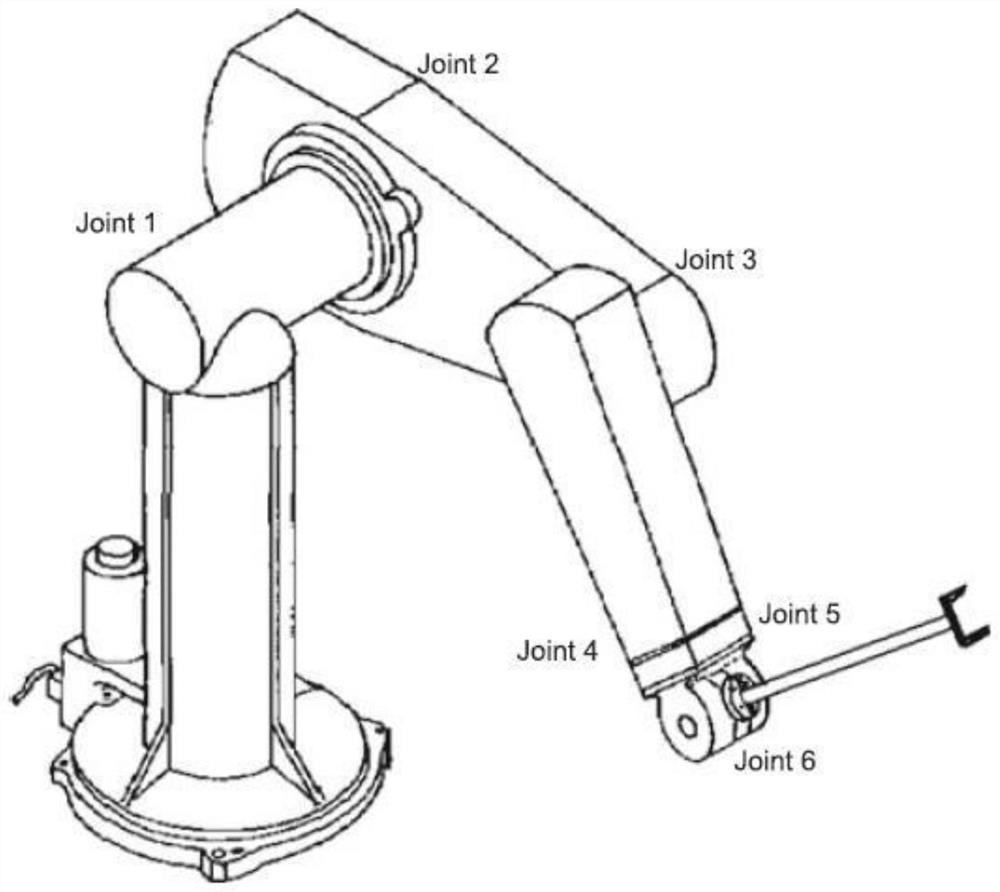
[0075] Set the desired return joint angle of the redundant robot PUMA560
[0076]
[0077] De...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More